Session d'acquisition Plancha
Conditions météo et heure d'acquisition
Une session d'acquisition se réalise le matin, idéalement au lever du soleil pour éviter les caustiques au fond de l'eau.
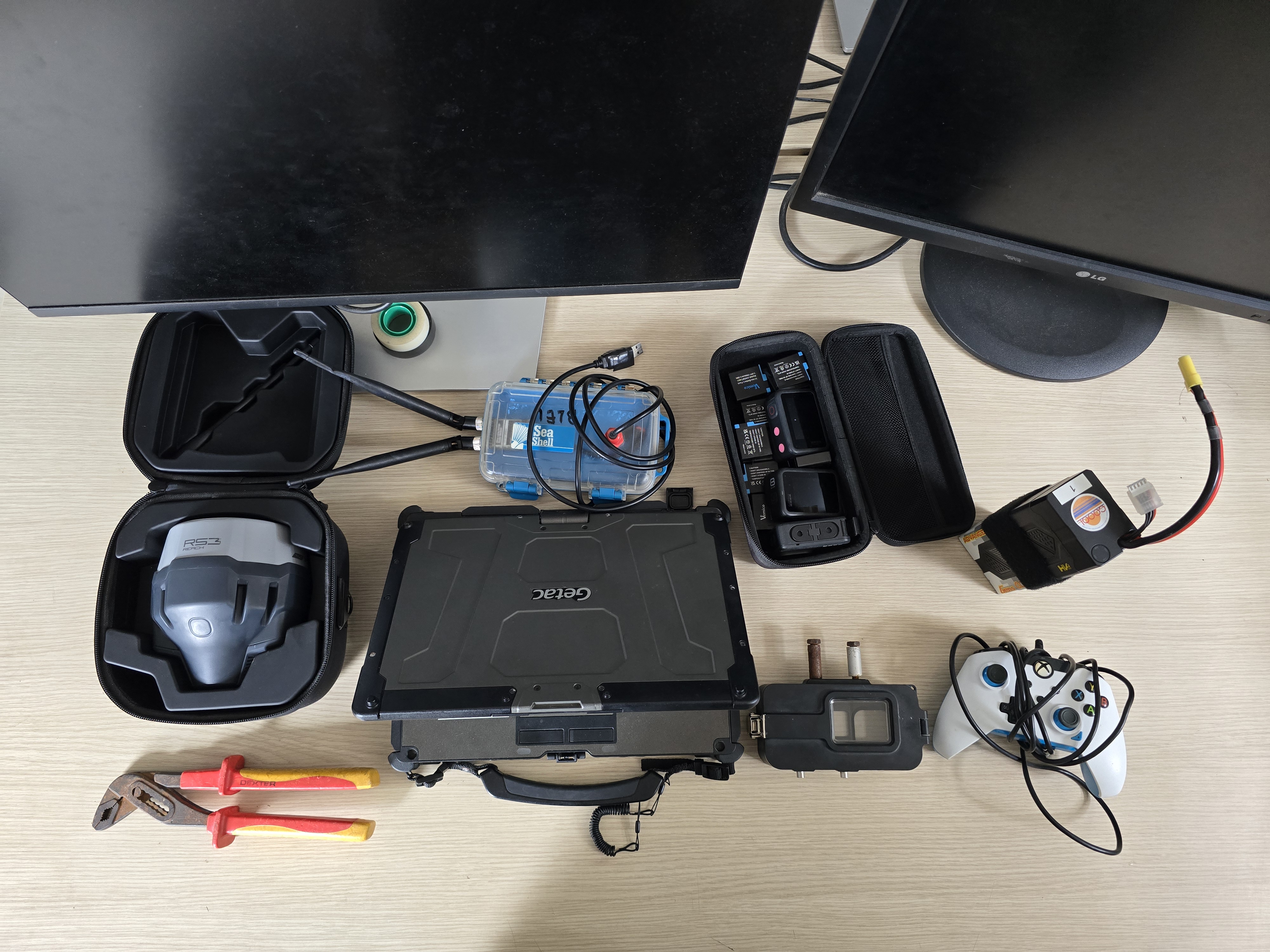
Préparation du matériel d'acquisition pour une session
- Ordinateur de terrain avec Mission Planner.
- Boîtier de télémétrie pour établir la communication.
- Manette pour piloter la planche.
- 2 batteries 4S 10A 1C (permettent de réaliser deux sessions).
- 1 GoPro avec ses batteries : prévoir les batteries (1 par session), le caisson étanche et les outils de fixation.
- Un Reach RS2/RS3 (« bouboule ») qui fera office de base GPS, avec son trépied et un téléphone pour le partage de connexion.
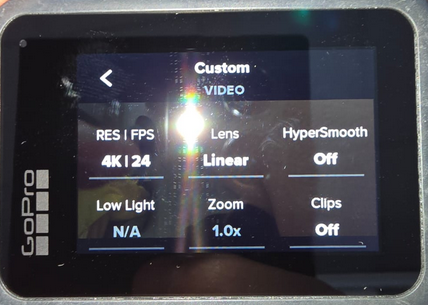
Les gopros doivent être configurés comme ceci :


Procédure sur la plage
Préparation du REACH RS2/3
Pour plus d'informations, voir le tutoriel d'Emlid.
- Déployer le trépied dans un espace dégagé (sans arbres ni bâtiments).
- Activer le partage de connexion sur son téléphone.
- Allumer le Reach et attendre que les LEDs deviennent bleues.
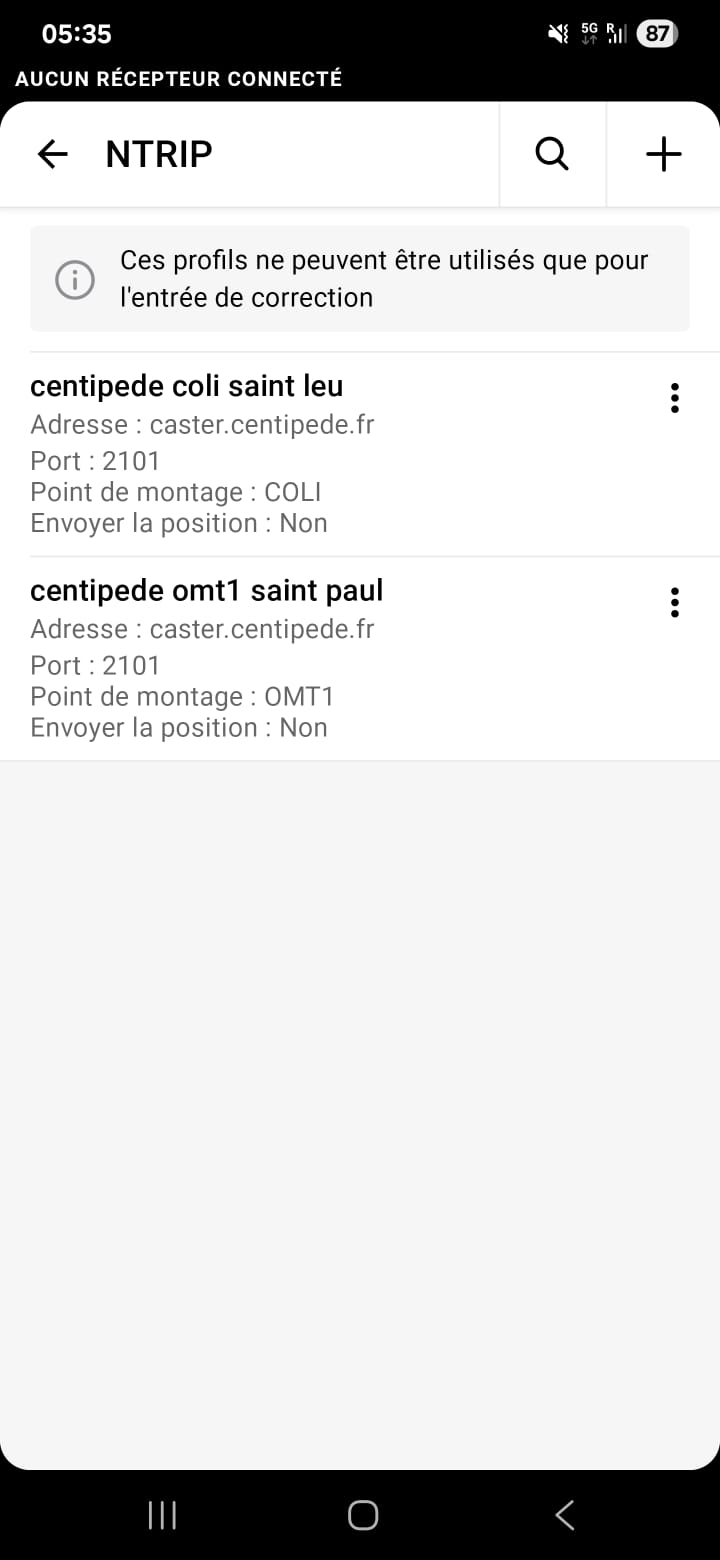
- Vérifier que la base est en FIX dans l'application Emlid Flow. Il faut la paramétrer pour qu'elle se connecte à une base Centipede : Lien tutoriel Centipede.

Préparation de la planche
- Vérifier la tension des batteries au multimètre et s'assurer que l'écart entre elles ne dépasse pas 0,1 V. Si la différence est supérieure, ne pas les utiliser sous peine de les endommager.
-
Installer les batteries dans la planche et l'allumer.
⚠️ Attention : Ouvrir le caisson de la planche doucement, car l'appel d'air peut aspirer des gouttes d'eau à l'intérieur.
-
Installer la batterie dans la GoPro et placer celle-ci dans son caisson.
⚠️ Important : Nettoyer soigneusement le joint du caisson s'il présente des grains de sable.
-
Juste avant la mise à l'eau, démarrer l'enregistrement de la GoPro et filmer l'heure sur une application d'horloge atomique (pour la synchronisation). Exemple : Atomic Clock.
- Optimiser la communication avec le PC en redressant bien les antennes.




Préparation de l'ordinateur

Configuration logicielle et lancement
- Brancher le boîtier de télémétrie et la manette Xbox à l'ordinateur.
- Lancer l'application Mission Planner.
- Se connecter à la planche avec les paramètres suivants :
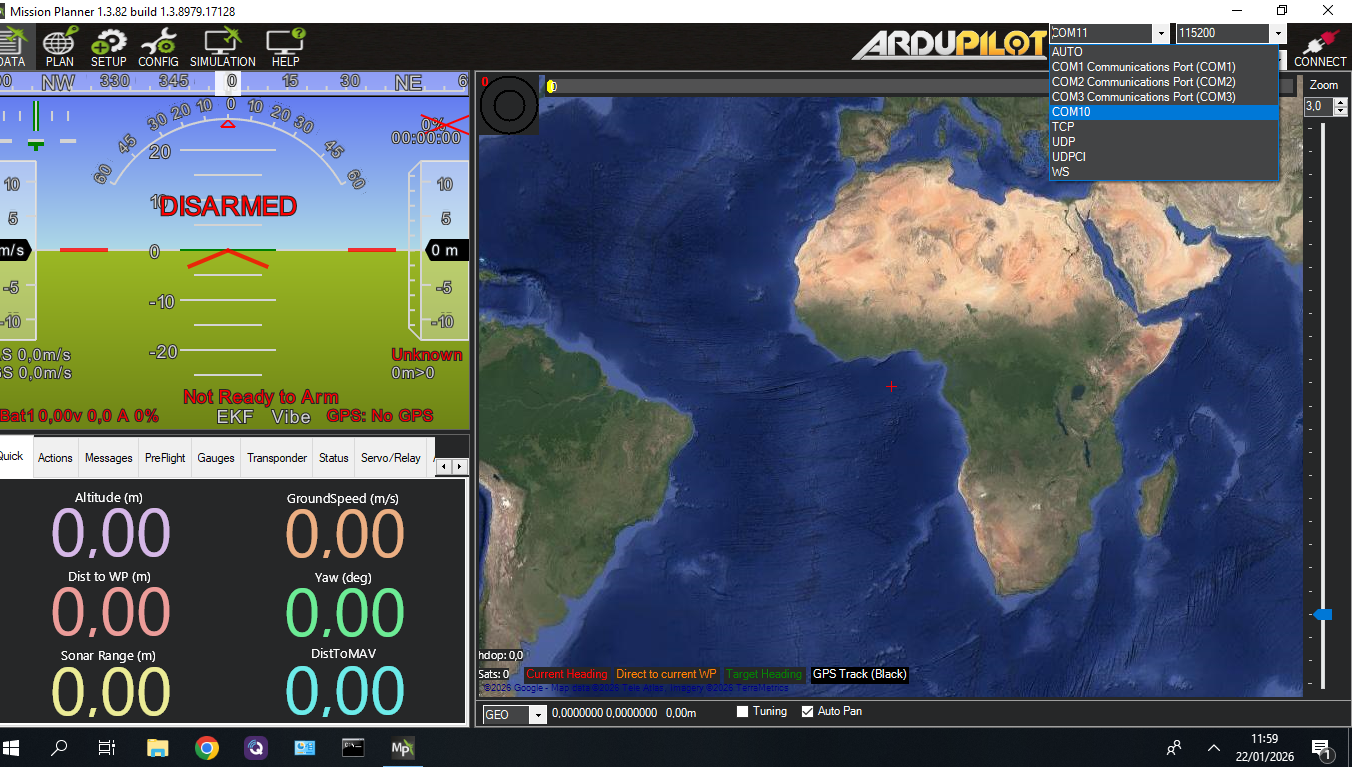
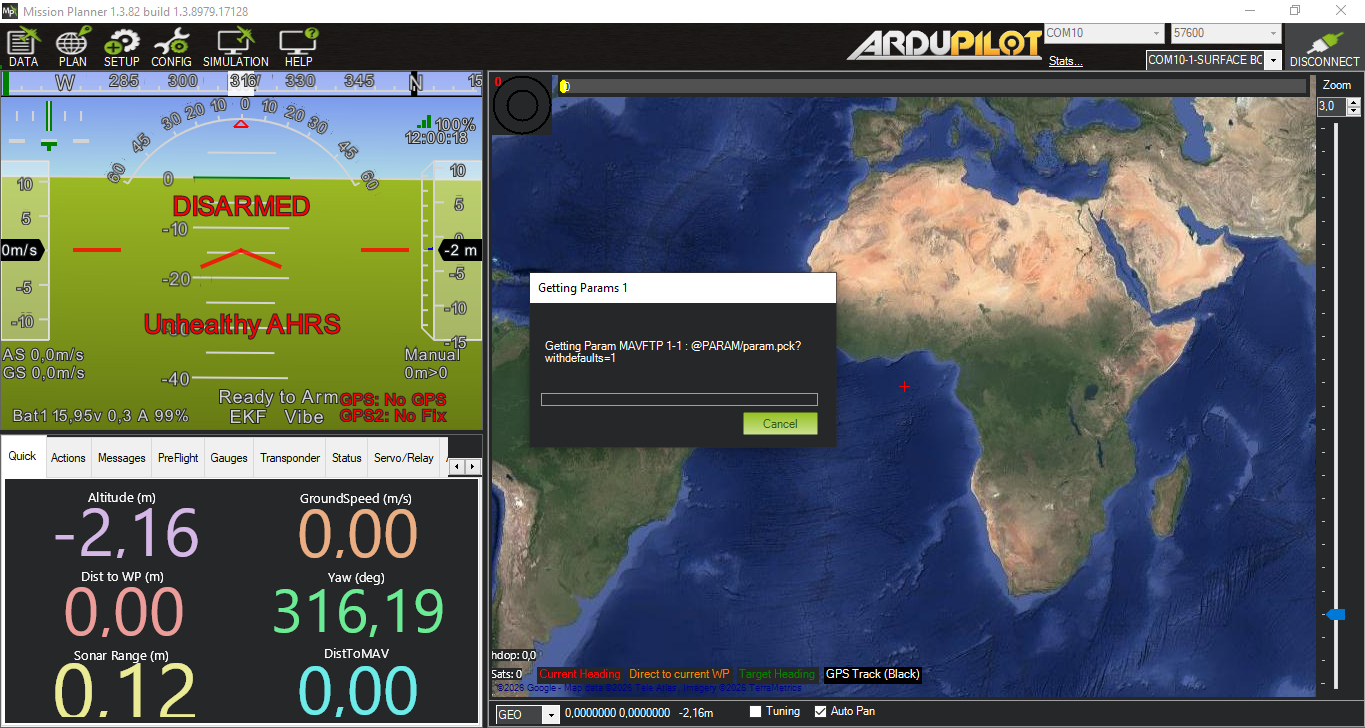
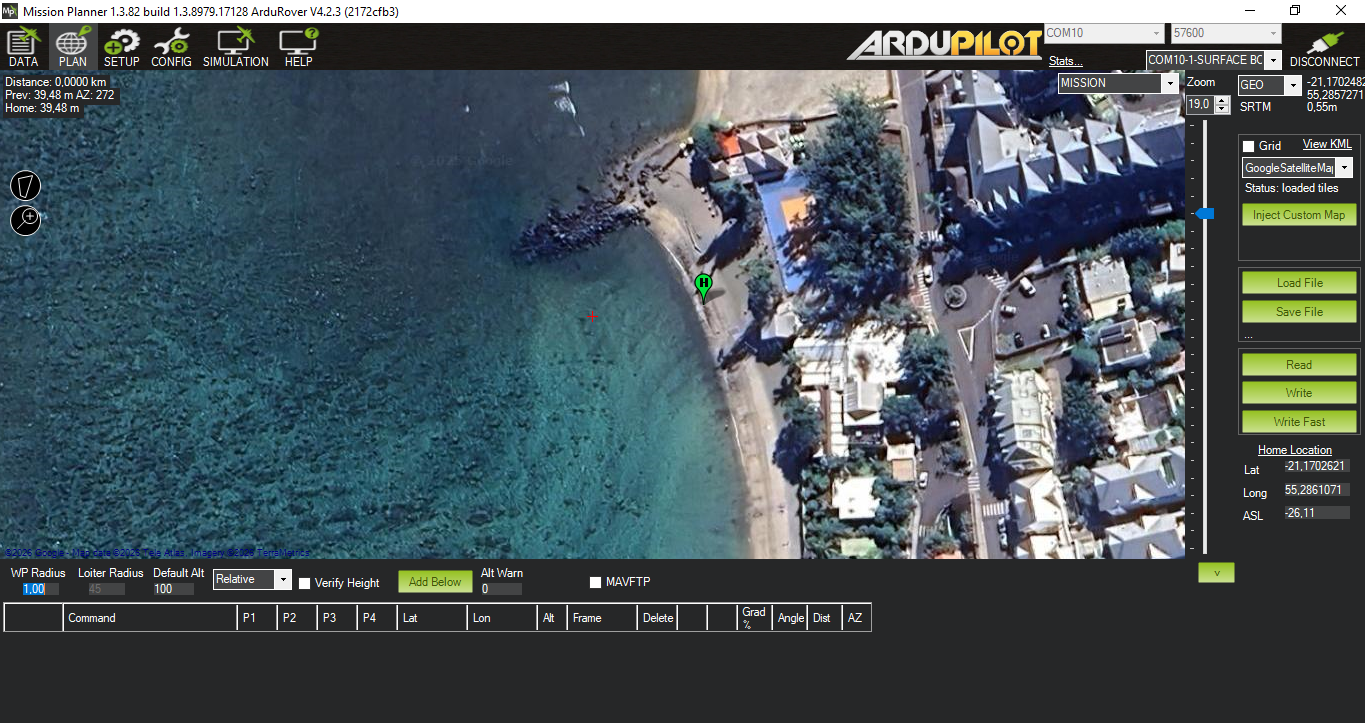
Une fois connectée, la planche doit apparaître sur la carte.
- Définir le "Home Point" sur la position actuelle de la planche pour éviter tout incident (RTL - Return to Launch).
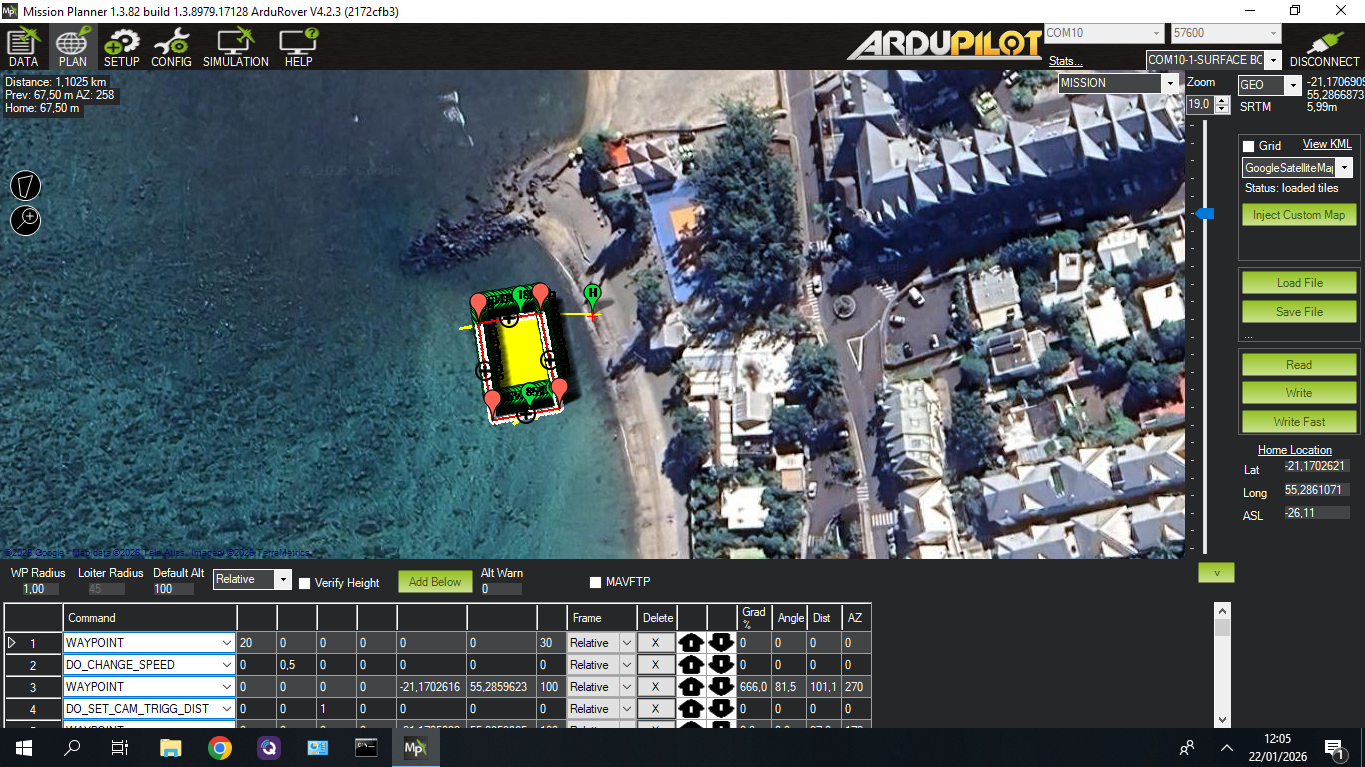
Création du plan de vol (Mission)
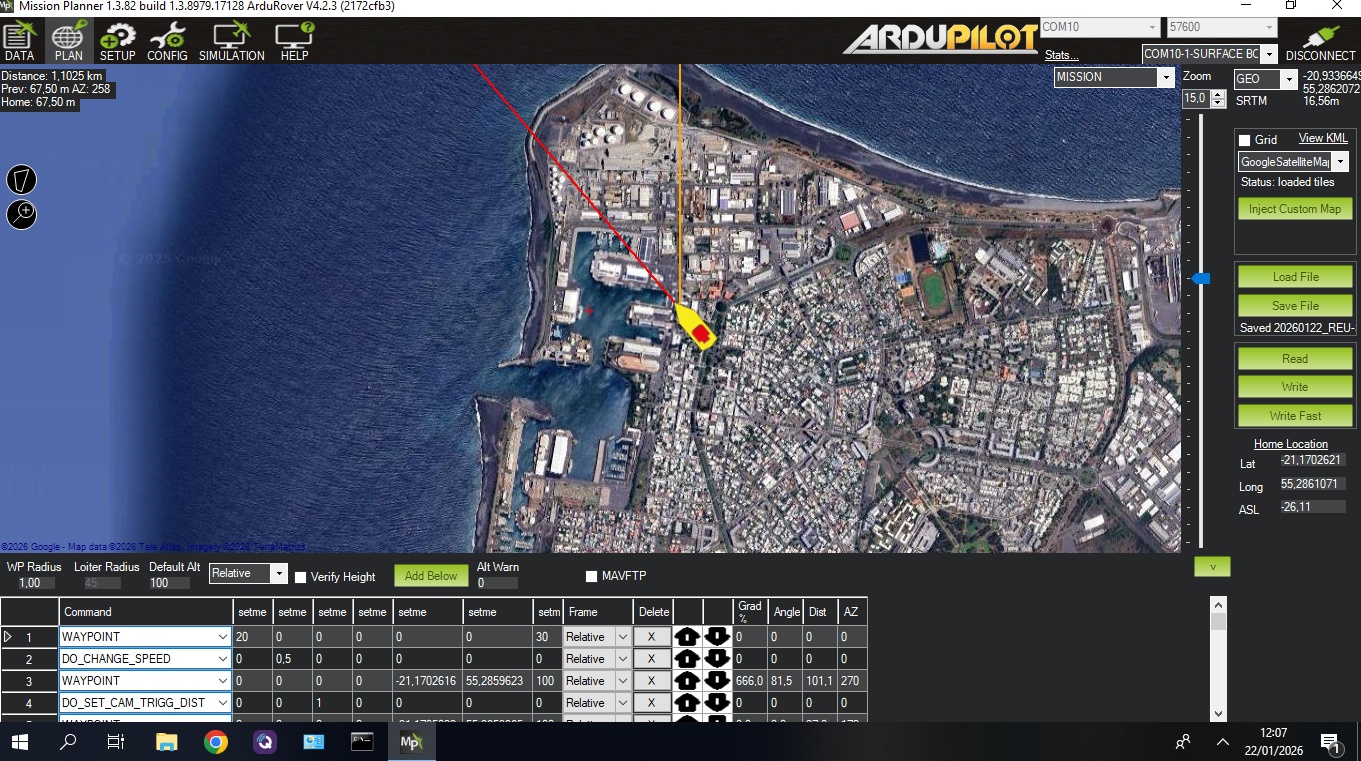
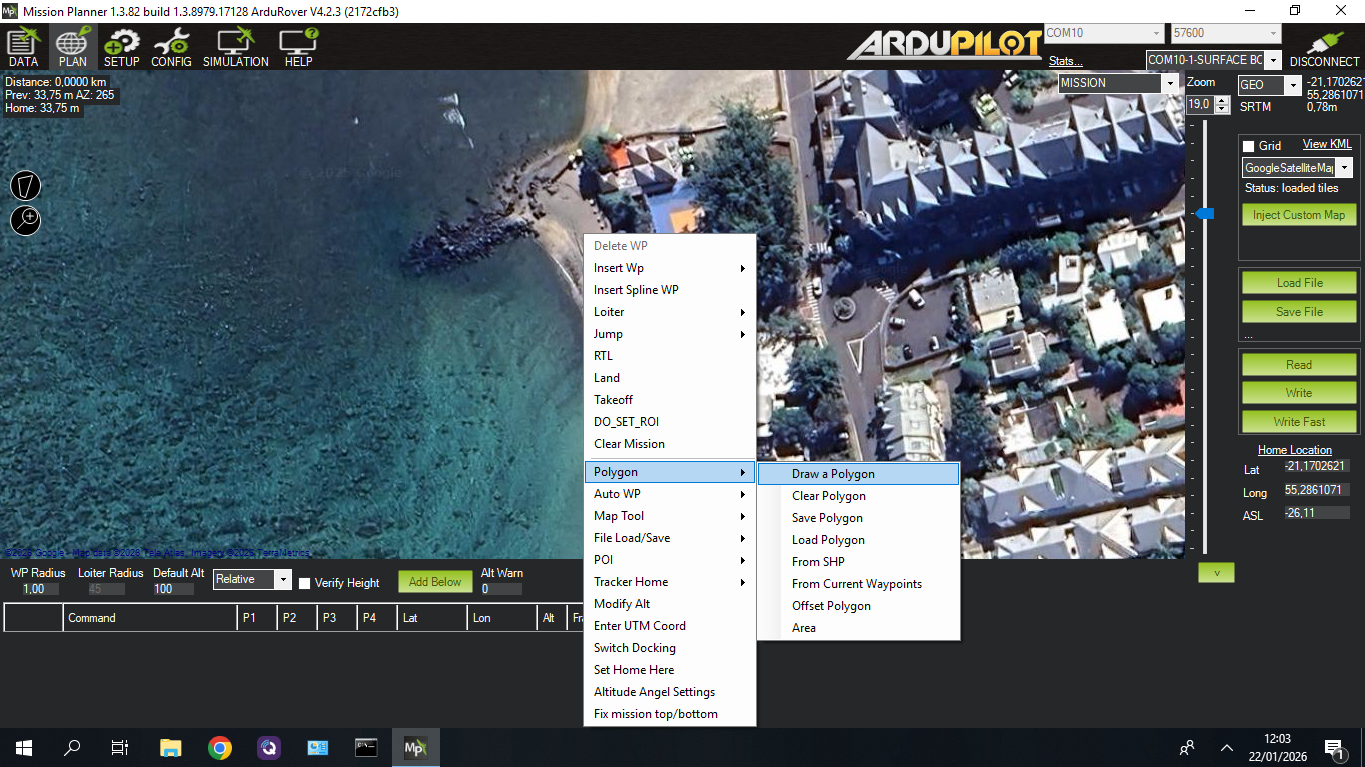
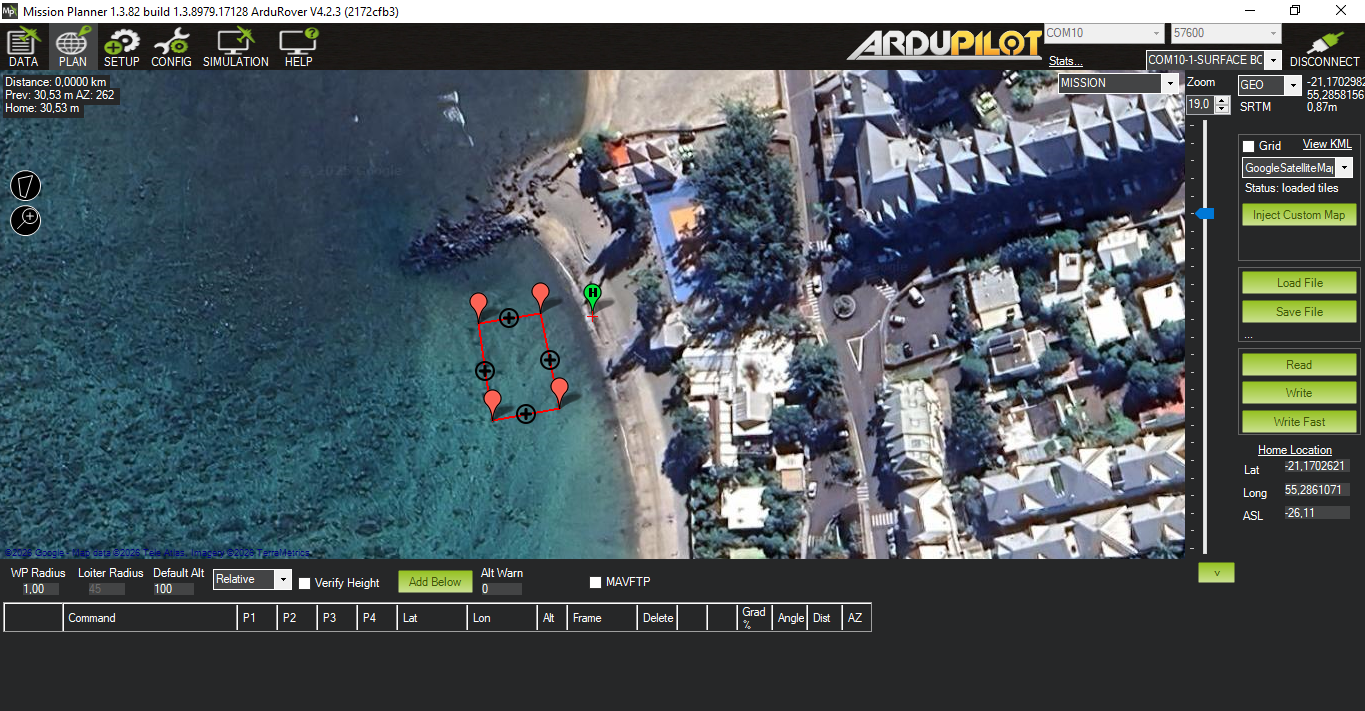
- Dans l'onglet Plan, dessiner un polygone : faire un clic droit sur la carte pour accéder au menu et placer 4 points pour former un rectangle.
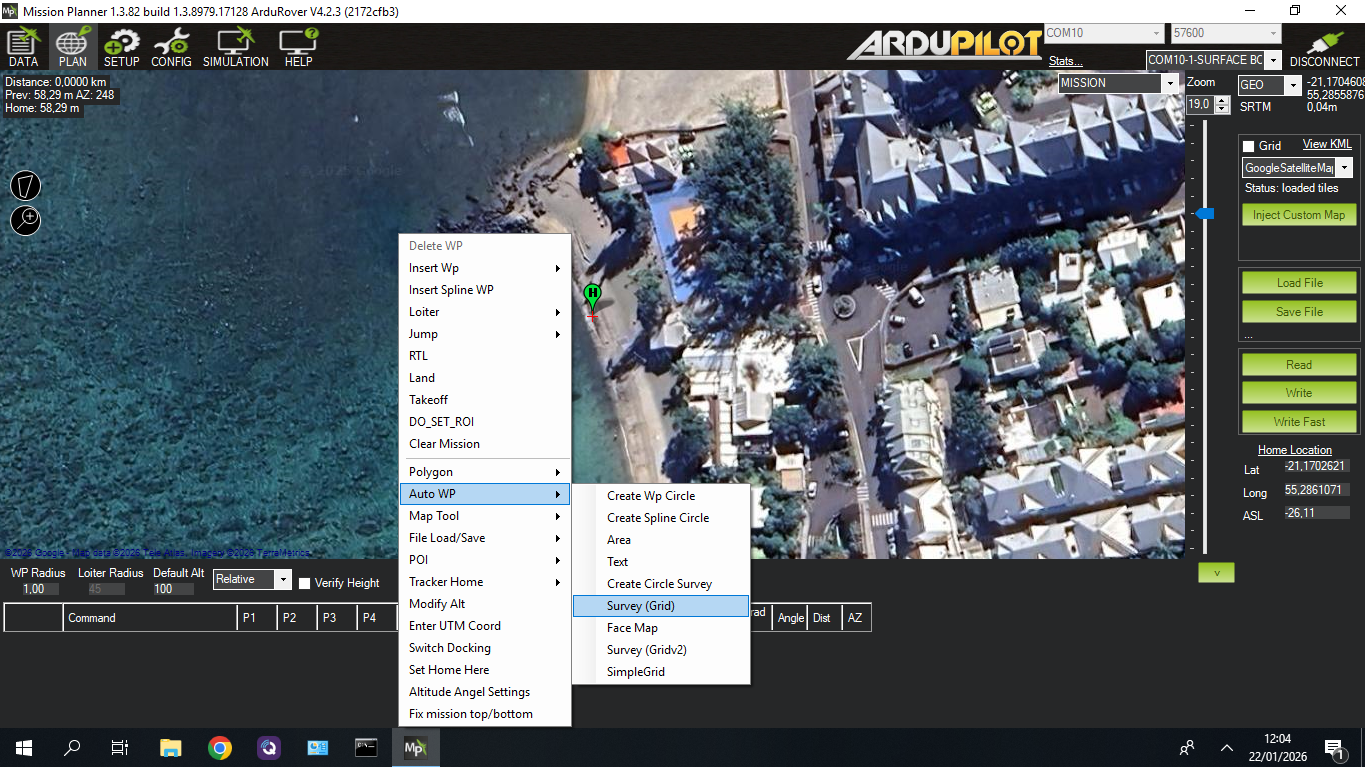
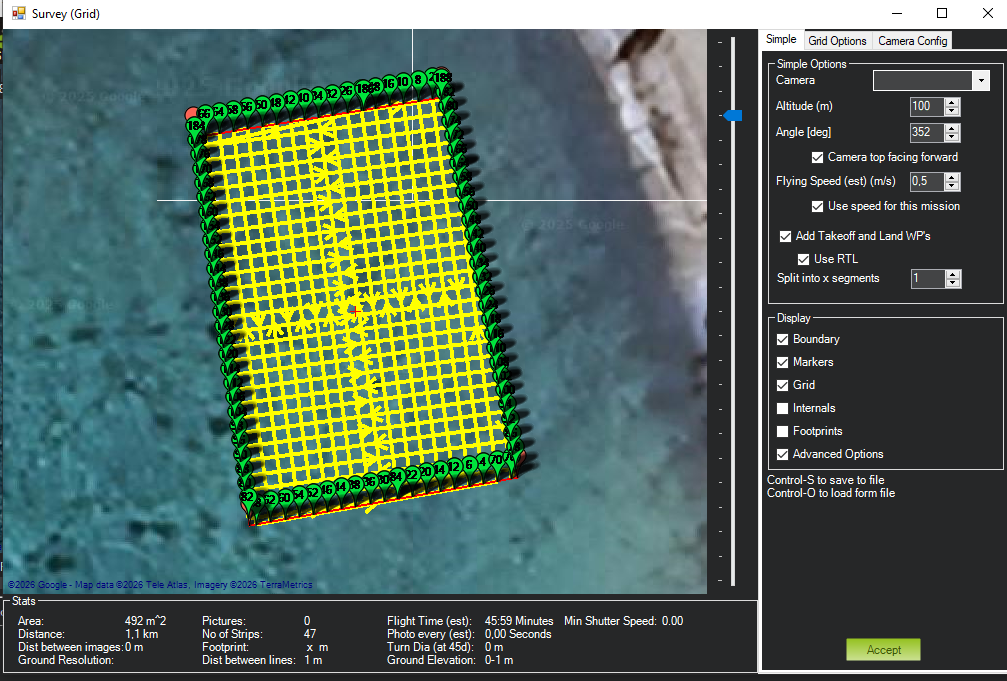
- Une fois la forme satisfaisante, faire un clic droit -> Auto-WP -> Survey (Grid). Une fenêtre contextuelle s'ouvre affichant le tracé (transect).
- Vérifications :
- Vitesse : Vérifier que la vitesse est bien réglée sur 1 m/s (panneau de droite).
- Temps de mission : Vérifier la durée estimée en bas de l'écran. Elle doit être comprise entre 50 min et 1h15. Au-delà, l'autonomie de la GoPro sera insuffisante.
- Home Point : Si le temps estimé est anormalement élevé, vérifier que le point H (Home) est bien situé à côté de la planche.
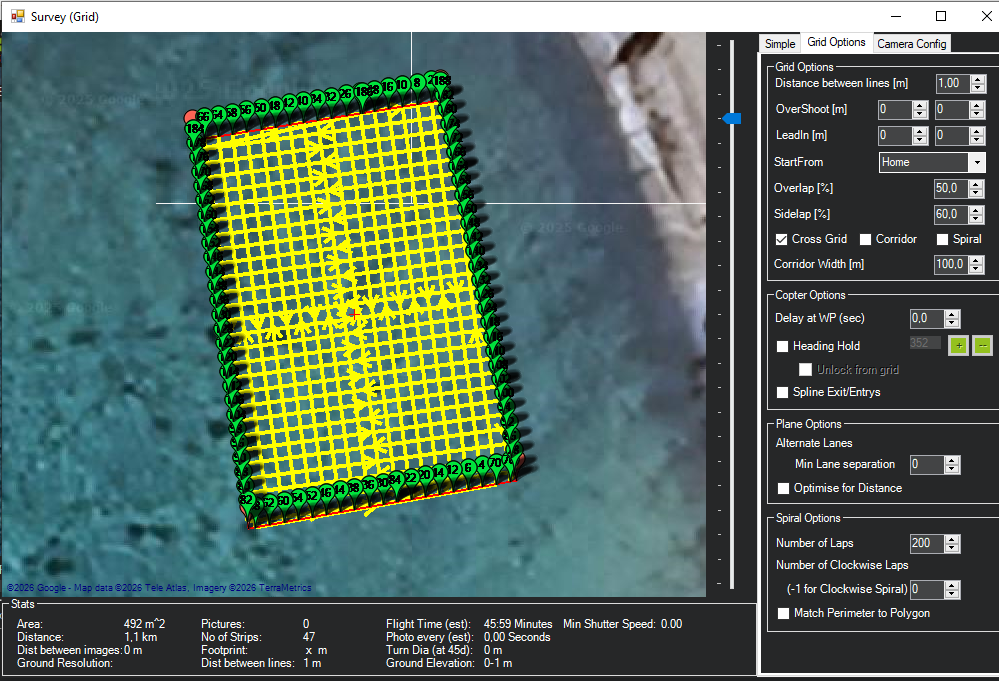
- Type de tracé : Dans le deuxième onglet du menu, vous pouvez changer le type de transect (Cross Grid ou Linear).
- Si tout est correct, revenir sur le premier onglet et cliquer sur Accept (ou Valider). Un rectangle jaune apparaît sur la carte.
Enregistrement et transfert
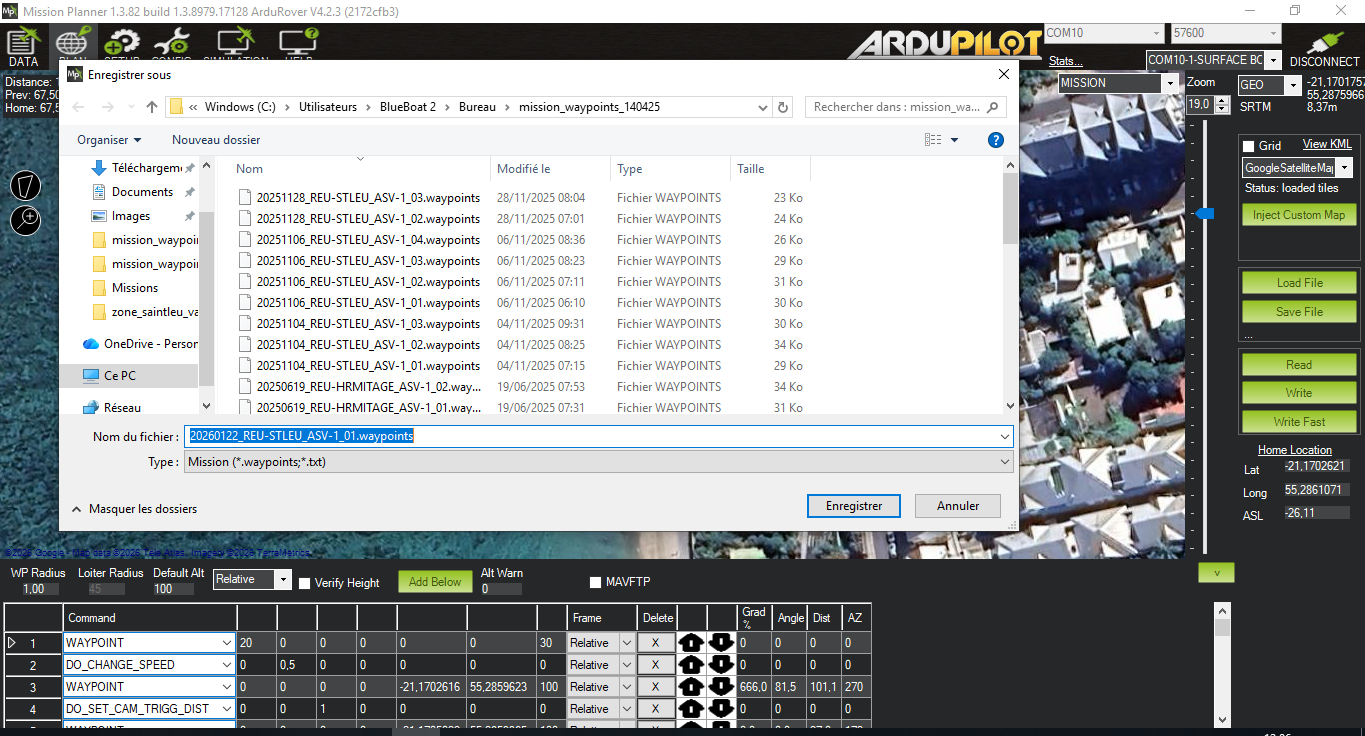
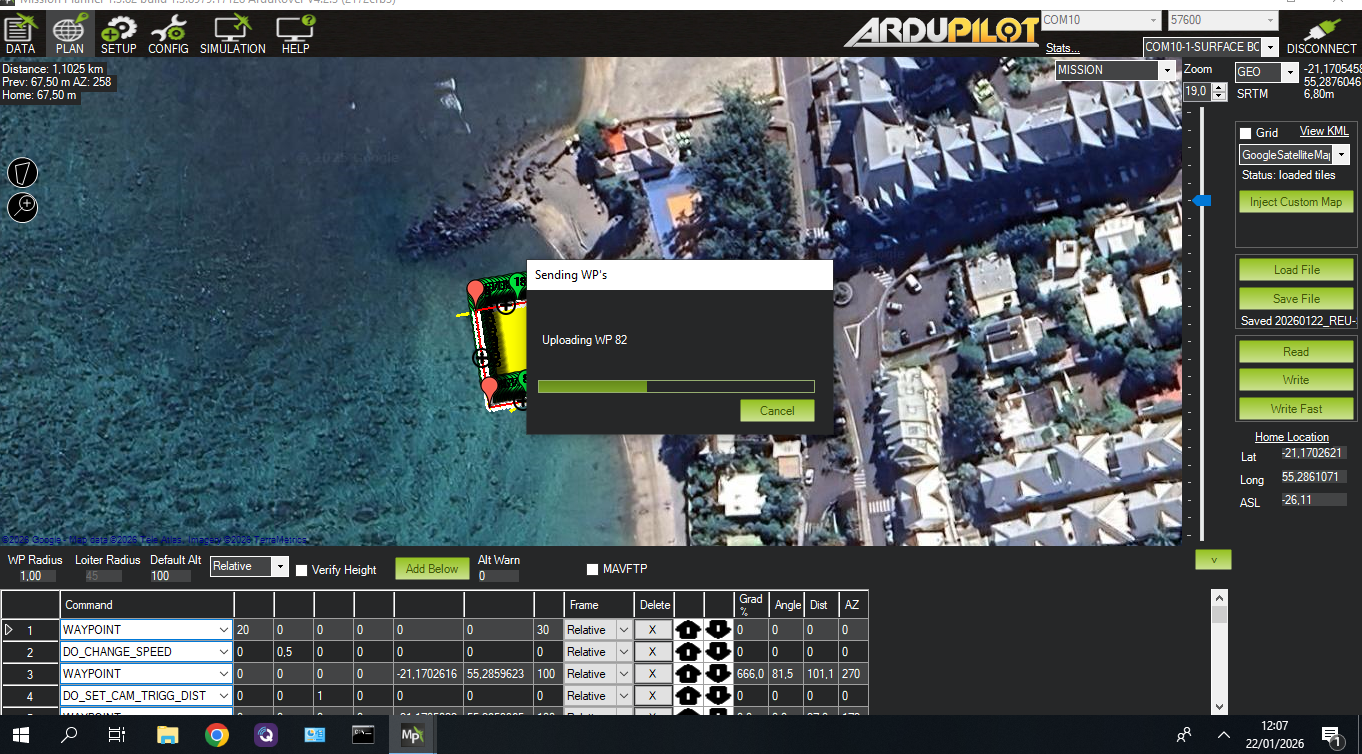
- Sauvegarder localement : Cliquer sur Save pour enregistrer le fichier de waypoints par sécurité (Ex:
20251110_REU-ST-LEU_ASV-1_01.waypoints). - Envoyer à la planche : Cliquer sur Write pour transférer les données vers la mémoire de la planche. Une fois le transfert terminé, la planche peut être mise à l'eau.
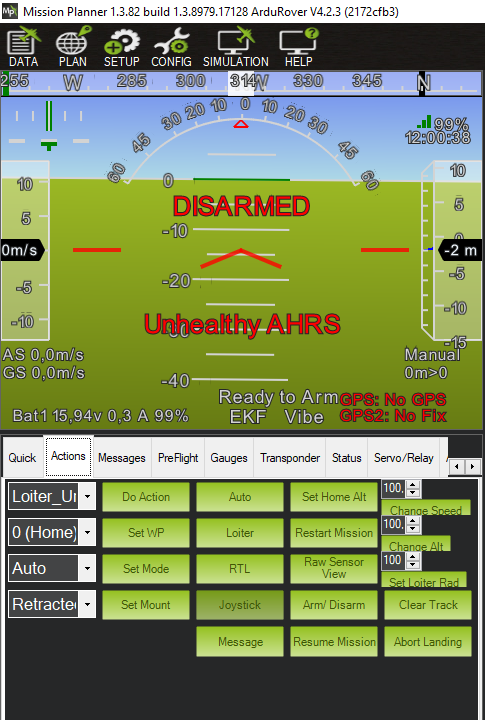
- Aller dans l'onglet Data, puis dans la fenêtre Actions pour activer la manette : Joystick > Enable.
Commandes de la manette (Xbox)
-
Joystick gauche (Haut/Bas) : Avancer / Reculer.
Note : Éviter de reculer, car l'arrière de la planche a tendance à s'enfoncer dans l'eau.
-
Joystick droit (Gauche/Droite) : Direction (Virages).
- Bouton X : Désarmer les moteurs.
-
Bouton B : Armer les moteurs.
⚠️ Attention : N'armer que si la zone est dégagée. En cas d'urgence, désarmer immédiatement.
-
Bouton Y : Mode Manual (Pilotage manuel).
- Bouton A : Mode Auto (La planche suit les waypoints enregistrés).

Suivi de mission et fin de session
Une fois la planche lancée, surveiller les indicateurs dans l'onglet Quick :
- Vérifier que l'échosondeur renvoie une valeur de profondeur.
- Vérifier que le GPS2 affiche un statut 3D Fix (ou mieux, RTK Fixed).

Important : À la fin de chaque mission, il est impératif d'éteindre, puis de rallumer la planche. Cela permet de séparer correctement les fichiers de log. Dans le cas contraire, les données de deux missions successives seront enregistrées dans le même fichier, compliquant le post-traitement.
Entretien de la planche
- Graisser le joint d'étanchéité de la Pellicase (utiliser de la graisse silicone si nécessaire).
- Rinçage systématique : Après chaque sortie, il est impératif de rincer abondamment à l'eau douce tout le matériel ayant été en contact avec l'eau de mer (coque, moteurs, capteurs, visserie).
FAQ
Est-ce que le REACH RS2/3 communique avec la planche ?
Non, nous ne travaillons pas en RTK (Real Time Kinematic). Le REACH RS2/3 est connecté au réseau Centipede via le partage de connexion et reçoit des corrections en temps réel. La planche, quant à elle, n'est connectée ni à la « bouboule » ni à Internet pour recevoir des trames de correction.
Comment sont synchronisés la caméra et le GPS ?
Lors du démarrage de la session, on filme une application d'horloge atomique sur téléphone. Lors de l'extraction des images de la vidéo, on note l'heure précise affichée sur l'image. Ce timestamp (horodatage) servira ensuite à synchroniser temporellement les clichés avec les données du log GPS.
Pourquoi faire du PPK au lieu du RTK ?
Le RTK serait possible, mais comme nous n'avons pas besoin d'une bathymétrie en temps réel et que nous devons de toute façon recalculer la position du GPS pour géoréférencer les images avec précision, le PPK (Post-Processed Kinematic) est privilégié. C'est plus simple logistiquement sur le terrain.
Que se passe-t-il si l'on perd la communication entre l'ordinateur et la planche ?
Rien de grave : la communication peut être interrompue sans souci. La planche est autonome. Selon sa configuration, elle revient à son point de départ (RTL) une fois la mission terminée ou reste en attente sur son dernier waypoint. Il est même possible d'utiliser 2 planches sur le même ordinateur.
Comment régler la fréquence entre la planche et le boîtier ?
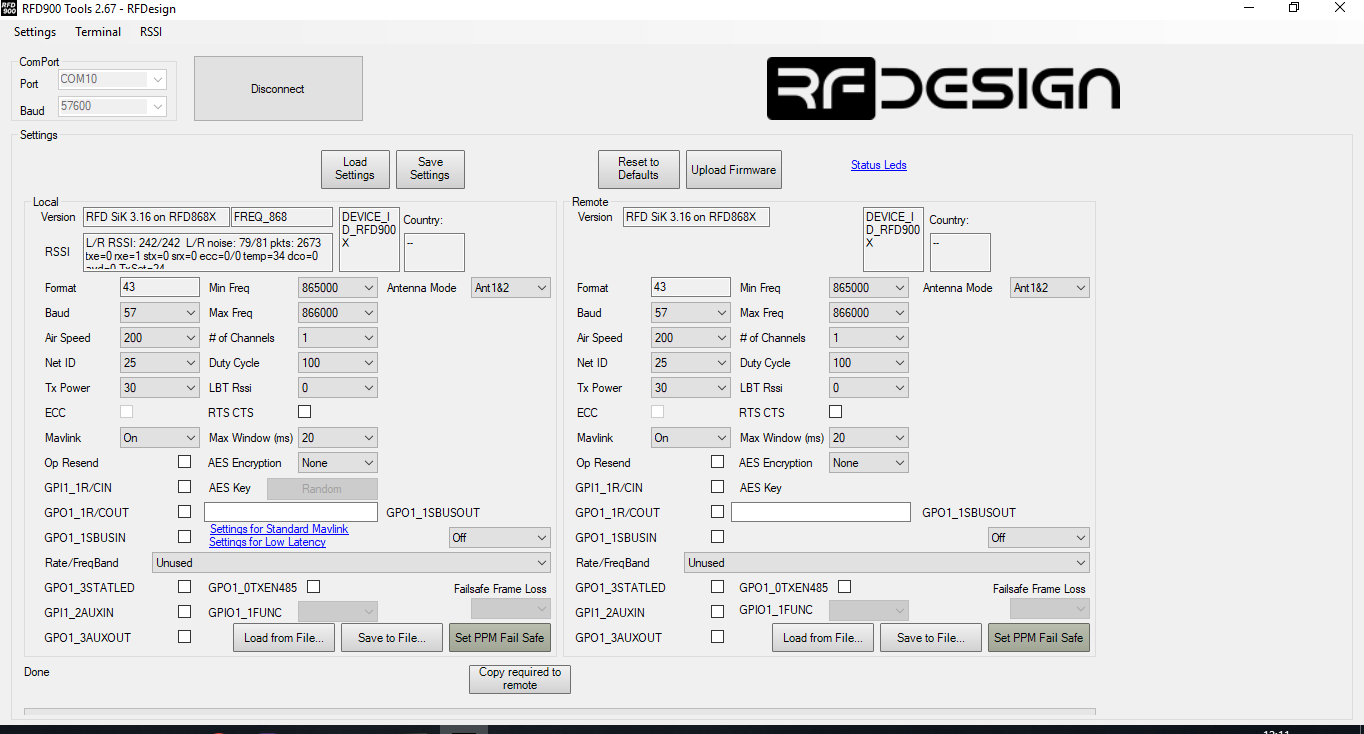
On utilise le logiciel RFDTools (disponible sur le site de RFDesign).
- Connexion : Brancher le boîtier de télémétrie à l'ordinateur, sélectionner le bon port COM et cliquer sur Connect.
- Lecture des paramètres : Cliquer sur Load Settings pour voir la configuration actuelle de la radio locale.
- Synchronisation : Pour que la planche et le boîtier communiquent, les paramètres suivants doivent être identiques sur les deux radios :
- Net ID : L'identifiant du réseau (ex: 25).
- Air Speed : La vitesse de transmission.
-
Min/Max Frequency : La plage de fréquences autorisée.
-
Validation : Une fois les modifications effectuées, cliquer sur Save Settings.
Note : Il est conseillé de ne pas modifier les fréquences d'usine sans une connaissance précise de la réglementation locale sur les bandes de fréquences (868 MHz en Europe / 915 MHz aux USA).
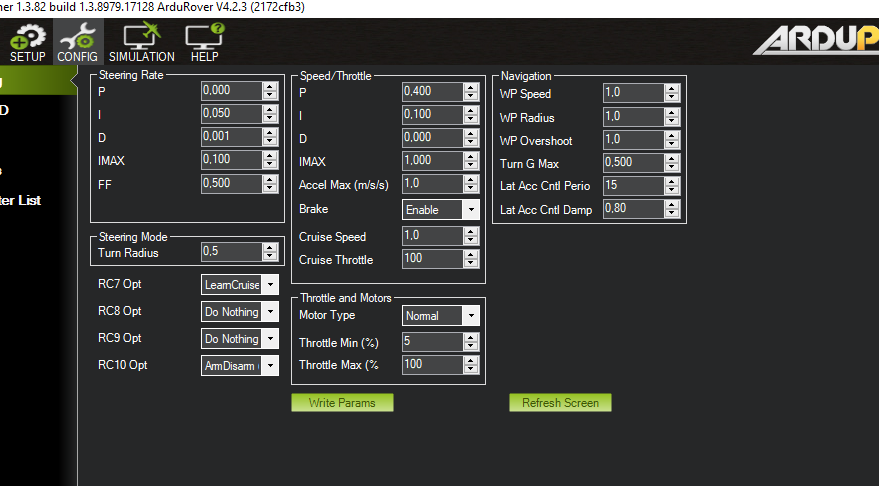
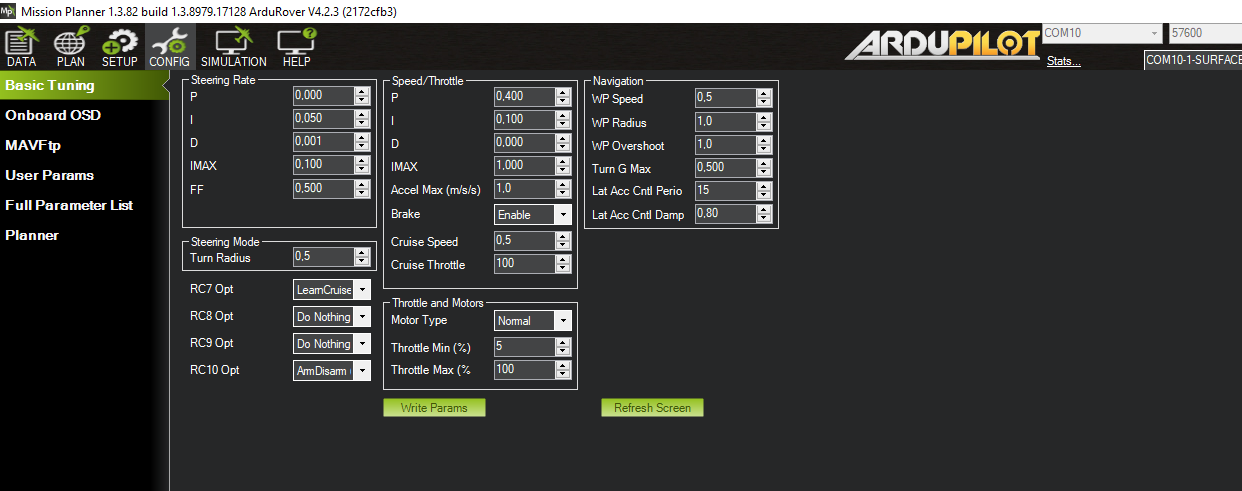
Comment régler la vitesse de la planche ?
On peut la régler à 0.5m/s si on est dans le lagon pour faire de la photogrammétrie mais sinon, il faut la laisser à 1m/s en pente externe.