Traiter une session de planche
Déchargement des données brutes
Créer un dossier tmp pour stocker temporairement les fichiers bruts. Le fichier du Reach RS3 se place à la racine, tandis qu'il faut créer un dossier spécifique par planche.
GPS Base - Reach RS3
Dans un premier temps, récupérez les données sur le Reach RS2/3 :
- Allumez-le sans partage de connexion ; au bout d'un moment, il passera en mode point d'accès (hotspot).
- Connectez-vous à son réseau Wi-Fi (le code est
emlidreach). - Une fois connecté, rendez-vous sur l'URL
192.168.42.1. - Allez dans l'onglet Logging et téléchargez l'archive
.zipdu jour. - Note : Sur les anciens firmwares, téléchargez manuellement les fichiers LLH et RINEX.
GPS Device - Reach M2
Pour le GPS de la planche :
- Allumez la planche. Au bout d'une minute ou deux, le Reach M2 passe en hotspot.
- Connectez-vous au réseau (mot de passe :
emlidreach). - Rendez-vous sur l'URL
192.168.42.1dans l'onglet Logging. - Téléchargez le fichier
.zip(ou les fichiers LLH et RINEX pour les anciens firmwares) dans le dossiertmpde la planche associée. Il y a autant de fichiers .zip que de sessions réalisées.
Fichiers de l'autopilote
L'autopilote (le Cube Orange) génère un fichier par mission, à condition d'avoir éteint la planche entre chaque session.
- Retirez la carte micro-SD et branchez-la sur le PC.
- Accédez au dossier
APM/LOGS. Il contient des fichiers.BINnommés par numéros. - Ils sont classés par ordre chronologique. Vous pouvez vérifier cet ordre grâce au script
utils/verify_bin.pydu dépôt GitHub plancha-workflow. - Copiez les fichiers
.BINdans le dossier temporaire de la planche, puis supprimez les fichiers sur la carte SD ainsi que le fichier.txtde 4 octets.
Données vidéo
- Récupérez les vidéos sur la carte SD de la GoPro.
- Pour différencier les fichiers appartenant à une même session, observez les deux derniers chiffres du nom de fichier (ils restent identiques pour les chapitres d'une même vidéo). ``
Rassembler les données brutes
Pour chaque session, créez un dossier respectant la nomenclature suivante :
YYYYMMDD_country-code-optinal-place_device_session-number
Exemple pour deux planches et deux sessions à Saint-Leu :
- 20250411_REU-ST-LEU_ASV-1_01
- 20250411_REU-ST-LEU_ASV-1_02
- 20250411_REU-ST-LEU_ASV-2_01
- 20250411_REU-ST-LEU_ASV-2_02
Chaque dossier de session doit contenir l'arborescence suivante :
.20250411_REU-ST-LEU_ASV-1_01
├── DCIM (Vidéos GoPro)
├── GPS
│ ├── BASE (Données du Reach RS3)
│ └── DEVICE (Données du Reach M2)
└── SENSORS (Fichier .BIN de la session)
À ce stade, les données brutes sont classées et prêtes à être exploitées.
⚠️ Important : Il est nécessaire de noter les sessions réalisées dans un fichier Excel pour assurer le suivi.
⚠️ Conseil de sécurité : En cas de doute ou de mauvaise manipulation, privilégiez toujours le copier-coller suivi d'une suppression manuelle plutôt que le déplacement direct des fichiers.
Traitement des données : Synchronisation Images et Données Temporelles
Actuellement, les données brutes ne sont pas directement exploitables : les vidéos ne possèdent pas de coordonnées GPS associées, la bathymétrie n'est pas corrigée et le GPS n'est pas encore traité en PPK (Post-Processed Kinematic).
Pour automatiser ce flux, nous utilisons le dépôt plancha-workflow. Reportez-vous au README pour l'installation de l'environnement.
1. Gestion des sessions par batch (Fichier CSV)
Pour traiter plusieurs sessions simultanément, utilisez l'option -csv. Il est fortement recommandé d'utiliser un fichier CSV pour conserver une trace des paramètres appliqués.
Exemple de structure CSV :
session_name,time_first_frame,number_first_frame,filt_exclude_specific_timeUS,depth_range_max,depth_range_min,filt_exclude_specific_datetimeUTC,rgp_station
20240607_REU-HERMITAGE_ASV-1_01,2024:06:07 03:07:19.60,20,,20,,,
20250414_REU-TROU-DEAU_ASV-1_03,2025:04:14 04:29:56.00,10,"[[201262382,219662452]]",,,,
⚠️ Note : Si vous n'utilisez pas de CSV, vous devrez configurer manuellement le fichier
ppk_config.json.
Étape 1 : Synchronisation temporelle et premières corrections
L'objectif est de trouver le décalage entre l'horloge de la caméra et le temps GPS.
- Récupération de l'heure : Exécutez la commande suivante :
python workflow.py -csv csv/2025_plancha.csv -os - Analyse des frames : Allez dans le dossier
PROCESSED_DATA/FRAMES. Trouvez la frame affichant l'heure, notez son numéro (number_first_frame) et l'heure affichée. - Conversion UTC : Soustrayez 4 heures (pour La Réunion) pour obtenir l'heure UTC. Exemple :
07:07:19.60devient03:07:19.60dans le CSV. - Vérification Qualité :
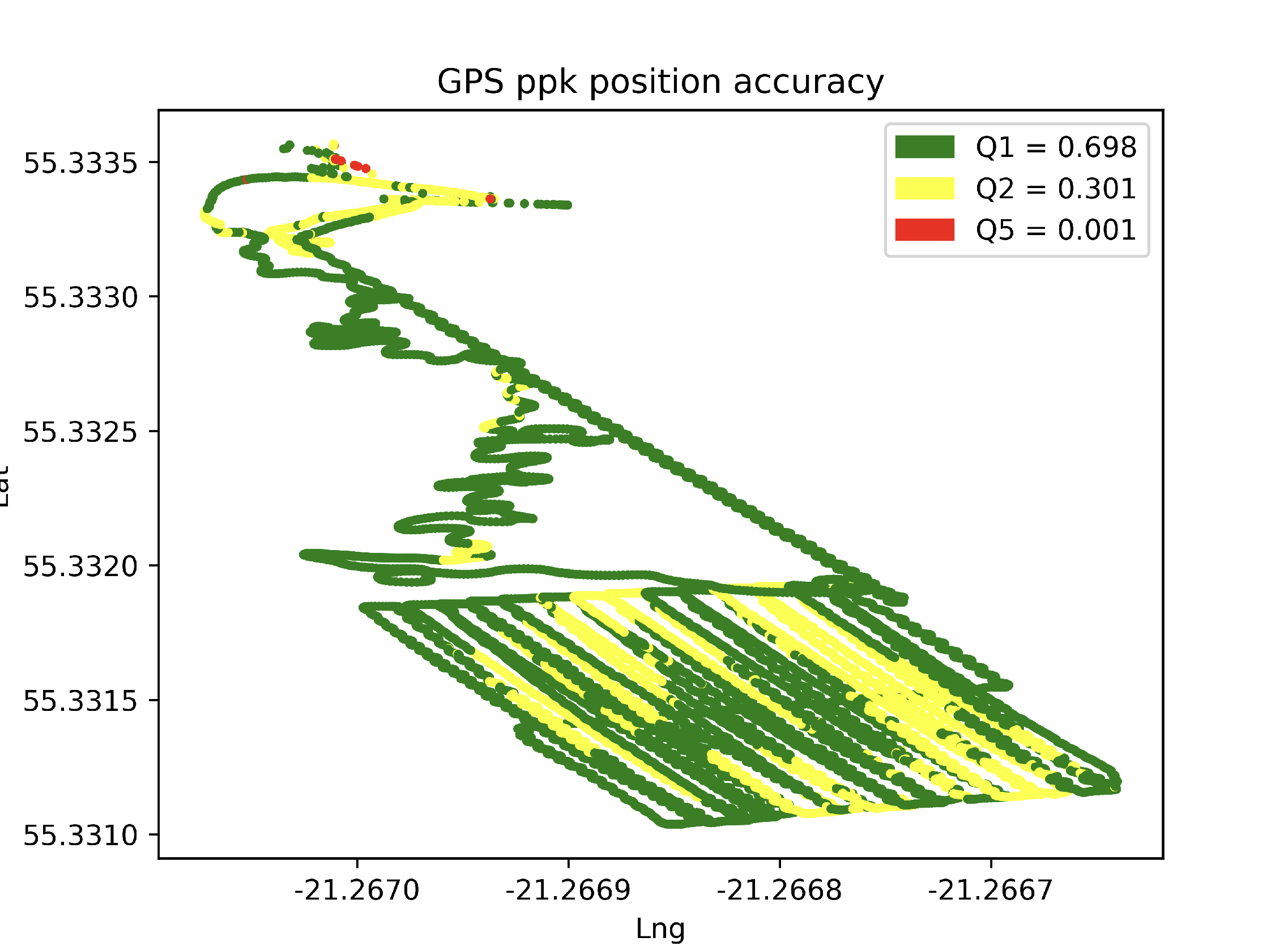
- GPS : Consultez
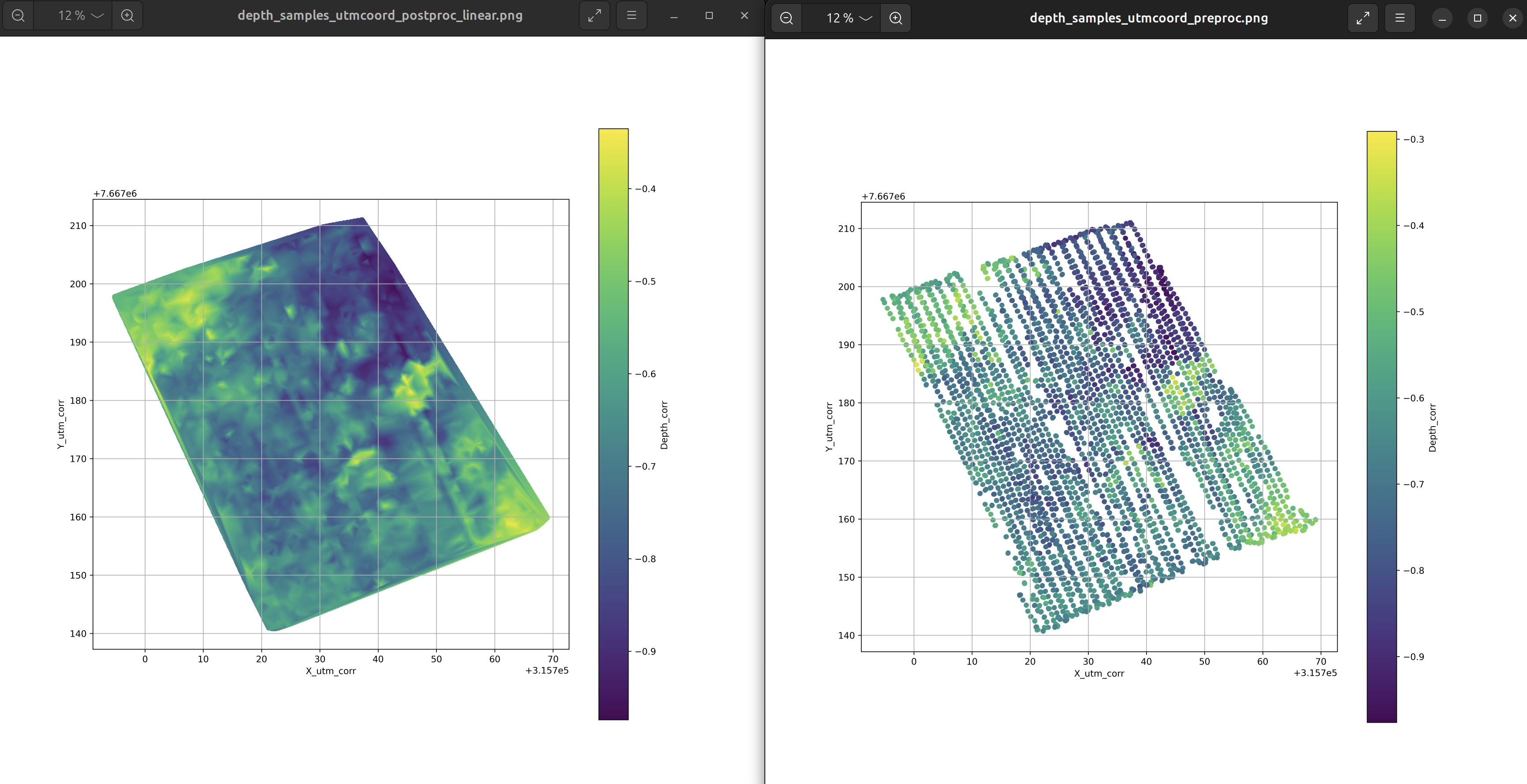
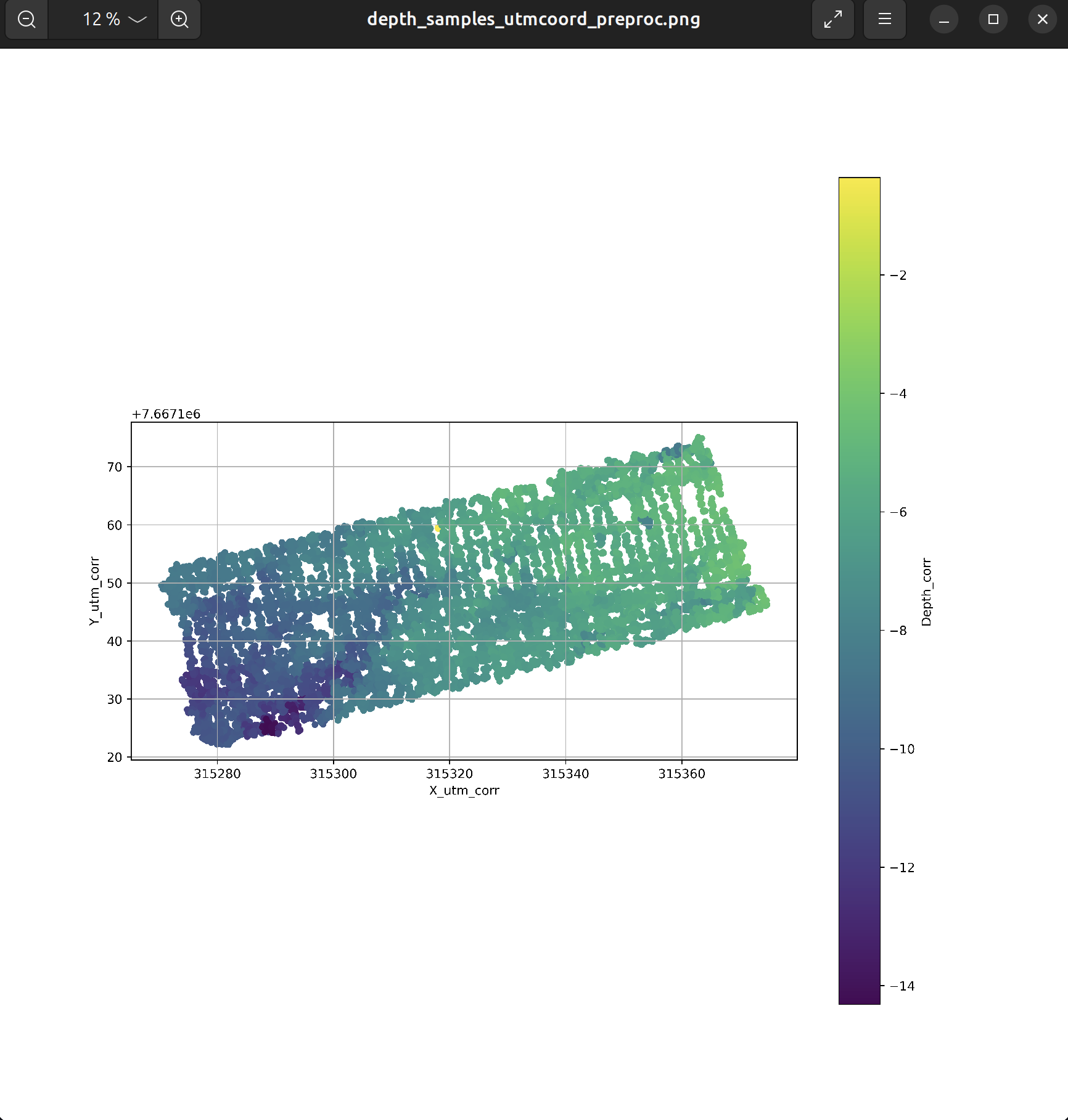
GPS/DEVICE/GPS_ppk_position_accuracy.png. Un bon géoréférencement doit afficher environ 90% de Q1 (Fix). - Bathy : Vérifiez
PROCESSED_DATA/BATHY/depth_samples_utmcoord_preproc.png. Si des valeurs sont aberrantes, renseignez les colonnesdepth_range_maxoumindans votre CSV.
Étape 2 : Traitement complet
Une fois la synchronisation renseignée dans le CSV, relancez le processus global :
python workflow.py -csv csv/2025_plancha.csv
Ce que fait le script :
- Découpage : Extraction à 2.997 fps (adapté au format GoPro 23.98 fps).
- Géolocalisation : Attribution d'une position GPS précise à chaque image.
- Métadonnées : Écriture des données dans les tags EXIF (position, attitude, etc.).
Résultats
On peut vérifier les métadonnées d'une image avec la commande :
exiftool -a -n -g /media/bioeos/D/202312_plancha_session/20231207_REU-HERMITAGE_ASV-1_02/PROCESSED_DATA/FRAMES/20231207_REU-HERMITAGE_ASV-1_02_1_1231.jpeg
et on obtient
---- ExifTool ----
ExifTool Version Number : 12.76
---- File ----
File Name : 20231207_REU-HERMITAGE_ASV-1_02_1_1231.jpeg
Directory : /media/bioeos/D/202312_plancha_session/20231207_REU-HERMITAGE_ASV-1_02/PROCESSED_DATA/FRAMES
File Size : 1102133
File Modification Date/Time : 2024:05:24 18:55:26+04:00
File Access Date/Time : 2026:01:21 17:35:14+04:00
File Inode Change Date/Time : 2024:05:24 19:04:29+04:00
File Permissions : 100664
File Type : JPEG
File Type Extension : JPG
MIME Type : image/jpeg
Exif Byte Order : MM
Comment : Lavc58.134.100
Image Width : 3840
Image Height : 2160
Encoding Process : 0
Bits Per Sample : 8
Color Components : 3
Y Cb Cr Sub Sampling : 2 2
---- JFIF ----
JFIF Version : 1 2
Resolution Unit : 0
X Resolution : 72
Y Resolution : 1
---- EXIF ----
Image Width : 3840
Image Height : 2160
Bits Per Sample : 8Dernier point de l'interval à retirer
Camera Model Name : HERO8 Black
X Resolution : 72
Y Resolution : 1
Resolution Unit : 1
Y Cb Cr Sub Sampling : 2 2
Y Cb Cr Positioning : 1
Exif Version : 0232
Date/Time Original : 2023:12:07 03:52:57
Components Configuration : 1 2 3 0
Exposure Compensation : 0
Focal Length : 2.92
Sub Sec Time Original : 297397000
Flashpix Version : 0100
Color Space : 65535
Focal Length In 35mm Format : 15
Sharpness : 1
Lens Serial Number : C3341327809152
GPS Version ID : 2 3 0 0
GPS Latitude Ref : S
GPS Latitude : 21.0872743786806
GPS Longitude Ref : E
GPS Longitude : 55.2264079169917
GPS Altitude Ref : 1
GPS Altitude : 0.69
Camera Serial Number : C3331353137142
---- XMP ----
XMP Toolkit : Image::ExifTool 12.40
GPS Pitch : -1.09227367931115
GPS Roll : -2.76290844206535
GPS Track : 144.349900596421
Video Frame Rate : 23.976
---- Composite ----
Image Size : 3840 2160
Megapixels : 8.2944
Scale Factor To 35 mm Equivalent: 5.13698630136986
Date/Time Original : 2023:12:07 03:52:57.297397000
GPS Altitude : -0.69
GPS Latitude : -21.0872743786806
GPS Longitude : 55.2264079169917
Circle Of Confusion : 0.00584900540241936
Field Of View : 100.388942610382
Focal Length : 15
GPS Position : -21.0872743786806 55.2264079169917
Troubleshooting
Problème GPS (Reach RS2/3)
Si les données de votre base RS3 sont de mauvaise qualité (GPSFix 5 ou absent), utilisez les stations du RGP (IGN).
- Identifiez la station la plus proche sur rgp.ign.fr.
- Modifiez
ppk_config.json:
"rgp_station": "lepo",
"force_use_rgp": true
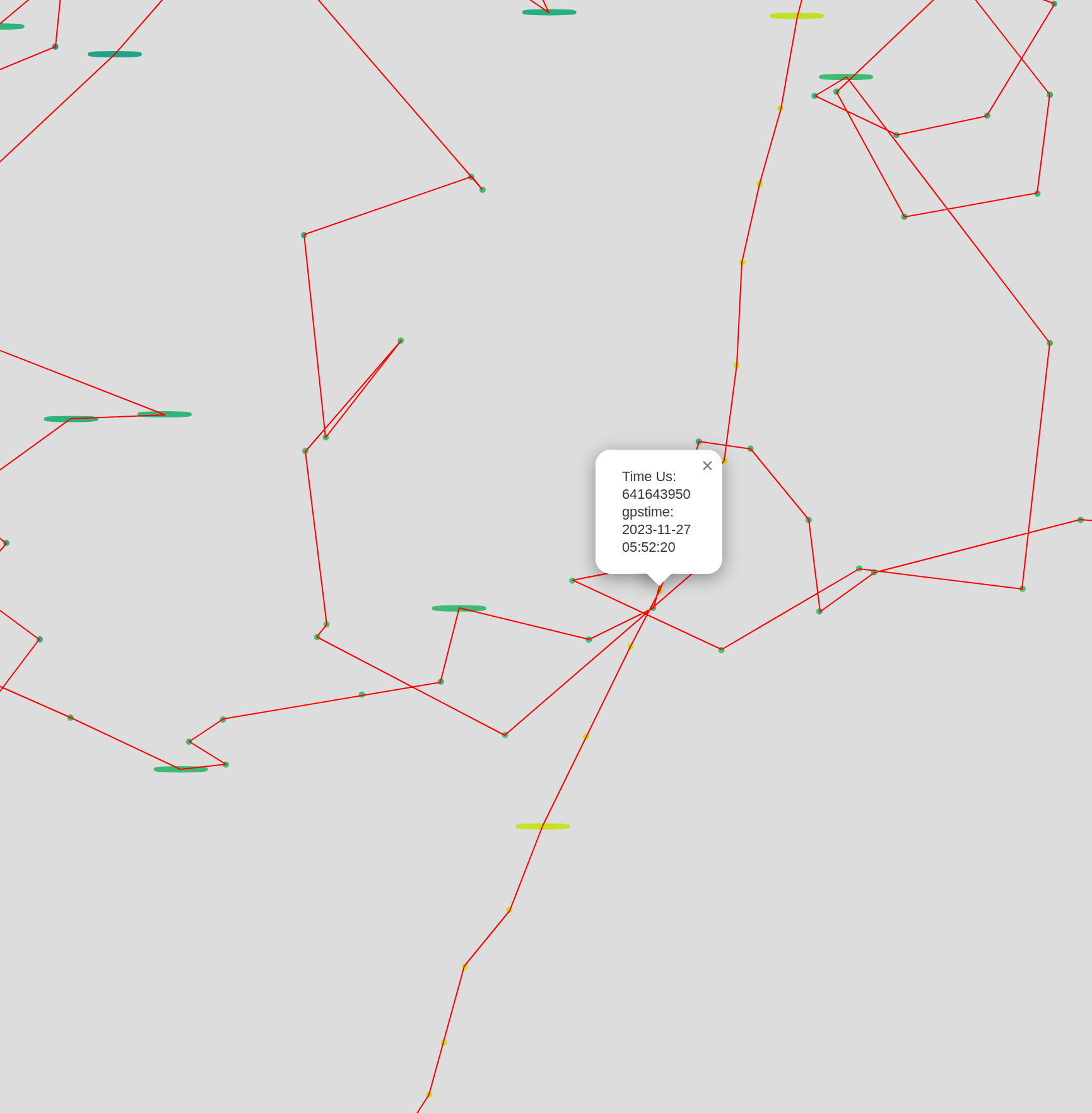
Correction d'une trajectoire dérivante dans la bathymétrie
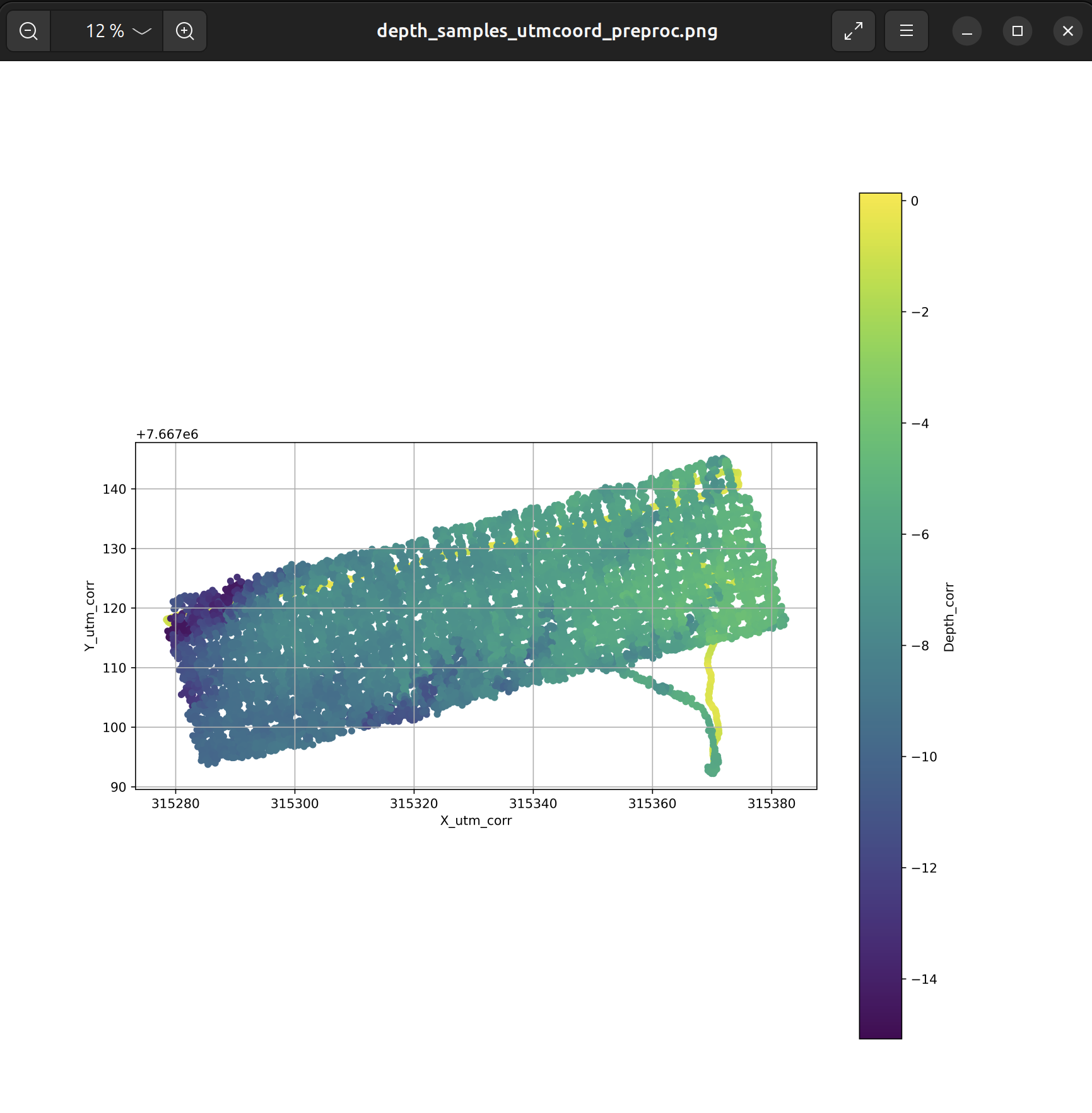
Il arrive que le fichier depth_samples_utm_coord_preproc.png affiche une trajectoire sortant du transect d'étude. Ce phénomène survient généralement lors d'une mise en manuel de l'ASV ou d'une dérive lors de la mise à l'eau. Pour obtenir un raster final propre, il est nécessaire de filtrer ces données aberrantes.
Méthode de filtrage :
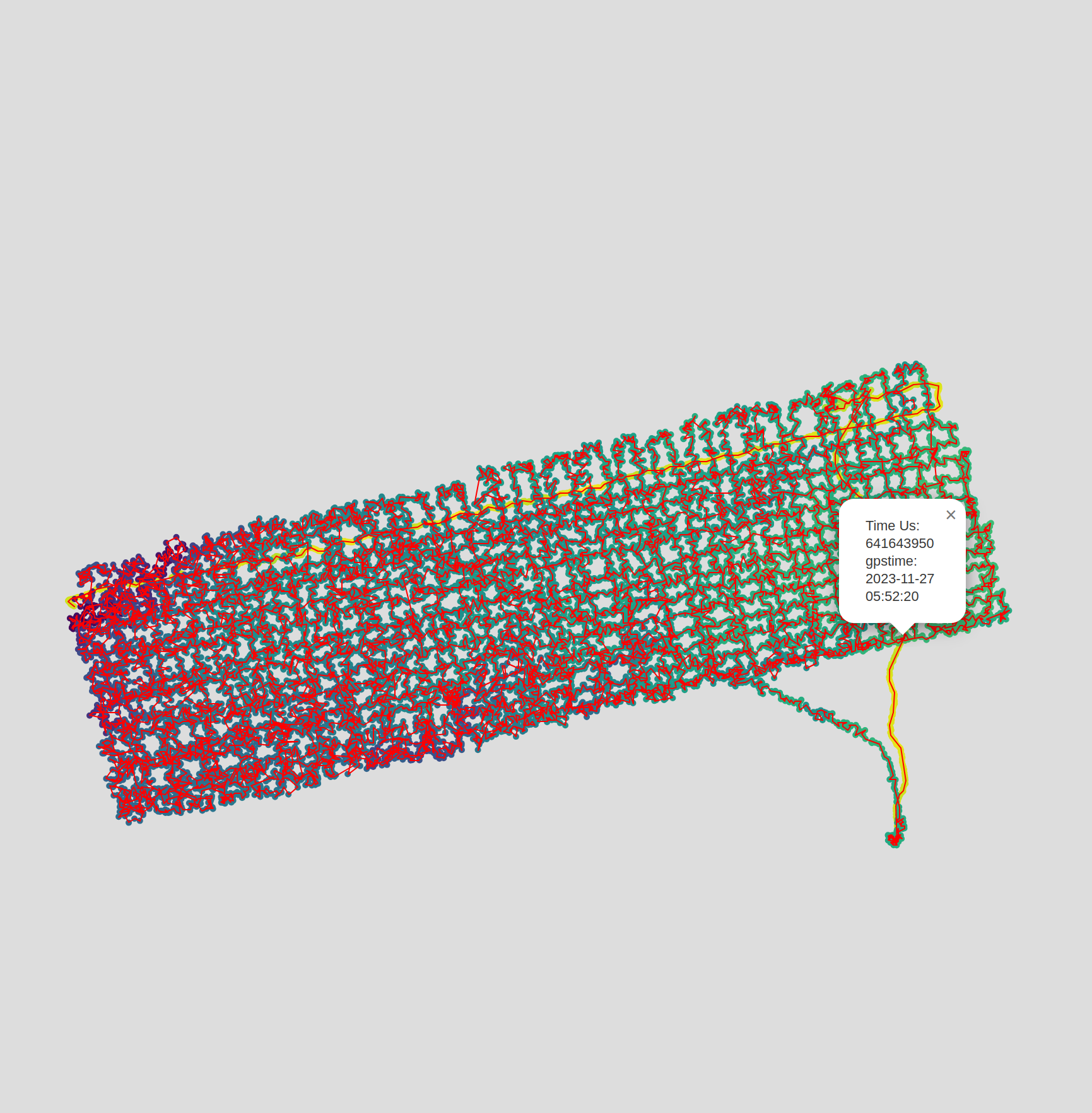
- Ouvrez le fichier interactif
webmap_usv_track.htmlsitué dans le dossierBATHY. - Identifiez visuellement le segment à supprimer.
- Cliquez sur les points correspondant au début et à la fin de la zone de dérive pour relever leurs valeurs respectives de
timeUS.
Dans cet exemple, nous avons identifié les bornes suivantes : 641643950 et 700444139.
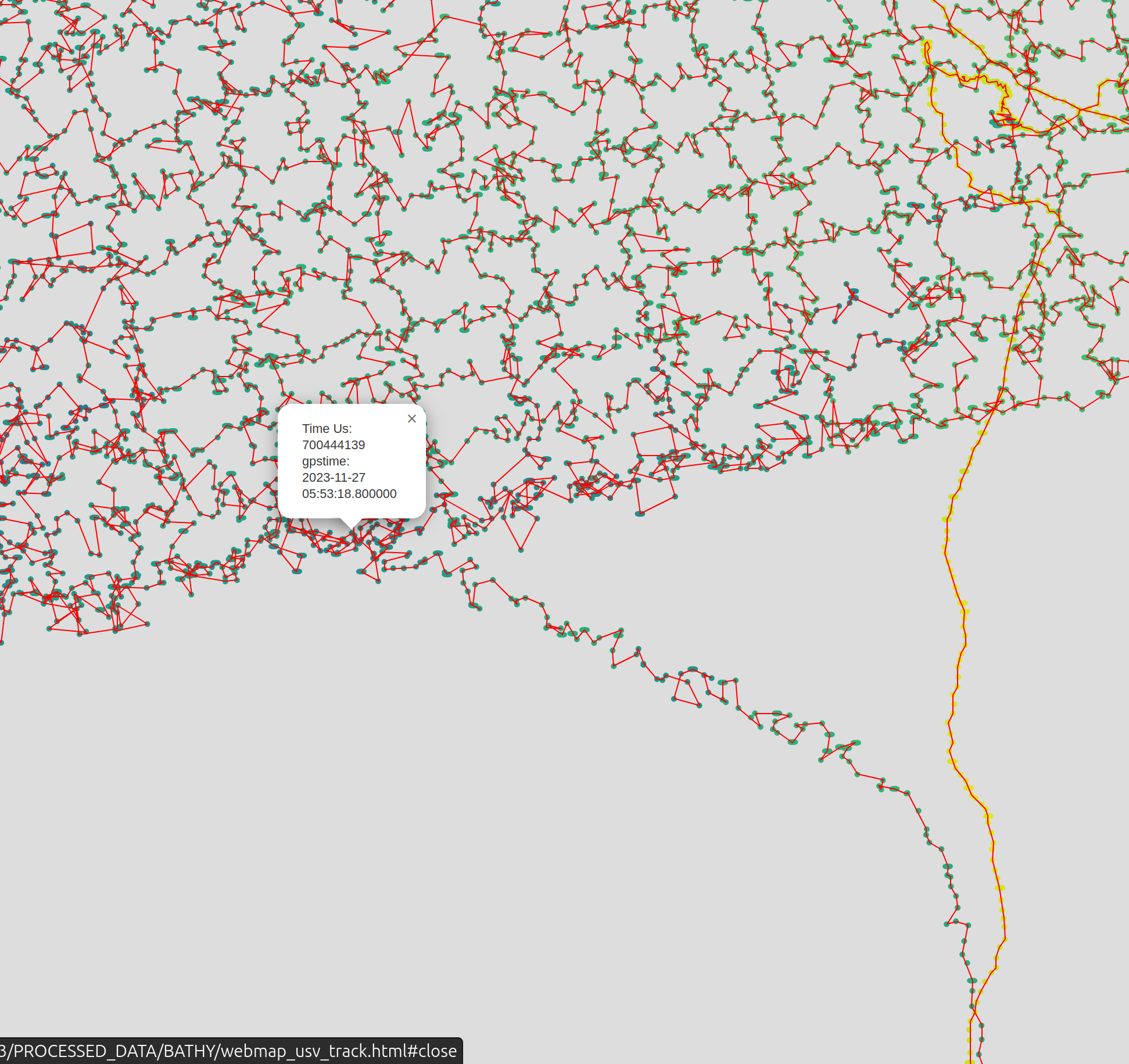
Astuce : Pour plus de précision, vous pouvez augmenter le niveau de zoom maximal en modifiant directement les paramètres dans le code source du fichier
.html.
Application de la correction :
Reportez l'intervalle temporel dans la colonne filt_exclude_specific_timeUS de votre fichier CSV, puis relancez le traitement :
session_name,time_first_frame,number_first_frame,filt_exclude_specific_timeUS,depth_range_max,depth_range_min,filt_exclude_specific_datetimeUTC,rgp_station
20231127_REU-HERMITAGE_ASV-2_03,2023:11:27 05:47:50.42,30,"[[641643950, 700444139]]",,,,
Résultat après filtrage :
Suppression des trajectoires indésirables dans les métadonnées (Session 20231213_REU-ETANG-SALE_ASV-2_01)
Une fois les deux étapes de traitement terminées, l'import du fichier metadata.csv dans QGIS peut parfois révéler des anomalies de trajectoire :

On observe ici des tracés qui s'étendent jusqu'au rivage. Ce problème survient généralement lorsque la session ne contient pas de fichier .BIN dans le dossier SENSORS : le programme ne parvient pas à détecter automatiquement les points de début et de fin de mission.
Procédure de filtrage manuel :
Pour nettoyer le jeu de données, nous devons définir manuellement les intervalles de temps à exclure. Dans ce cas précis, nous isolons deux périodes (le trajet aller vers la zone et le trajet retour après la mission).
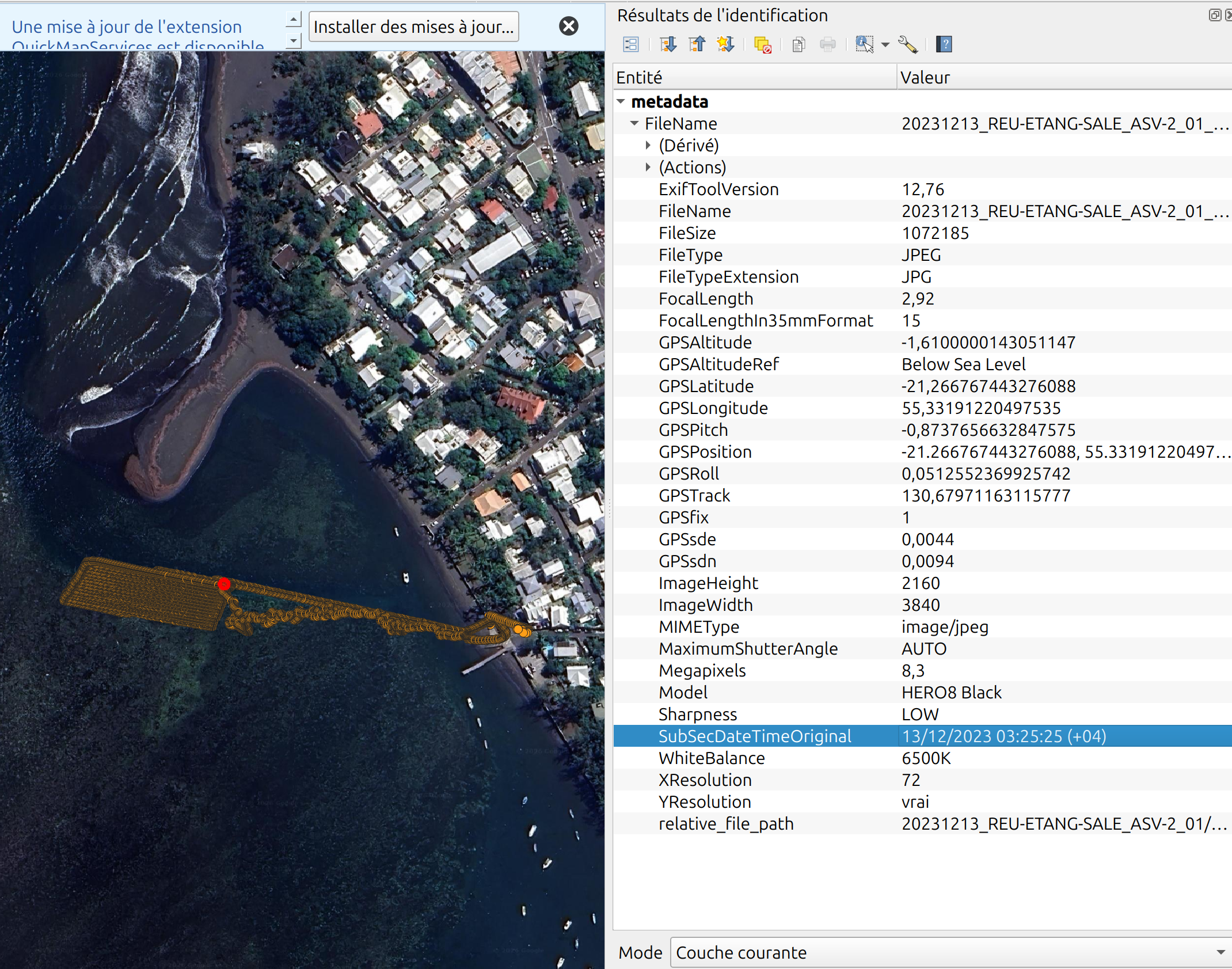
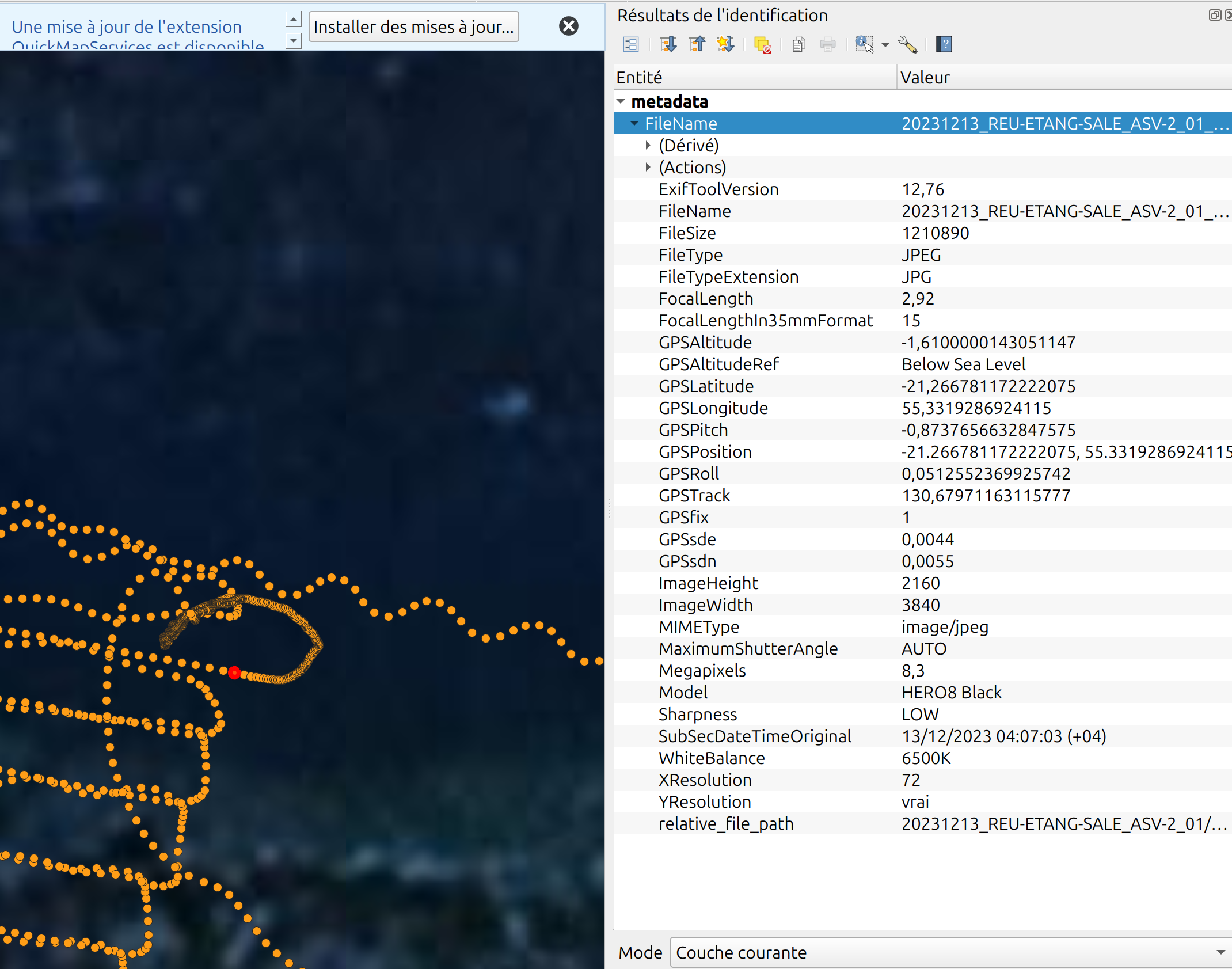
Les deux intervalles identifiés pour suppression sont :
[['2023:12:13 03:22:04.0','2023:12:13 03:25:25.0'],['2023:12:13 04:07:03.0','2023:12:13 04:18:48.0']]
Note : Un filtrage légèrement large est préférable pour éliminer les accumulations d'images stagnantes sur un même point en bord de côte.
Relance du traitement :
Il est nécessaire de relancer l'intégralité de la pipeline (incluant l'extraction des images) en renseignant la colonne filt_exclude_specific_datetimeUTC dans votre CSV :
session_name,time_first_frame,number_first_frame,filt_exclude_specific_timeUS,depth_range_max,depth_range_min,filt_exclude_specific_datetimeUTC,rgp_station
20231213_REU-ETANG-SALE_ASV-2_01,2023:12:13 03:21:47.15,20,,,,"[['2023:12:13 03:22:04.0','2023:12:13 03:25:25.0'],['2023:12:13 04:07:03.0','2023:12:13 04:18:48.0']]",
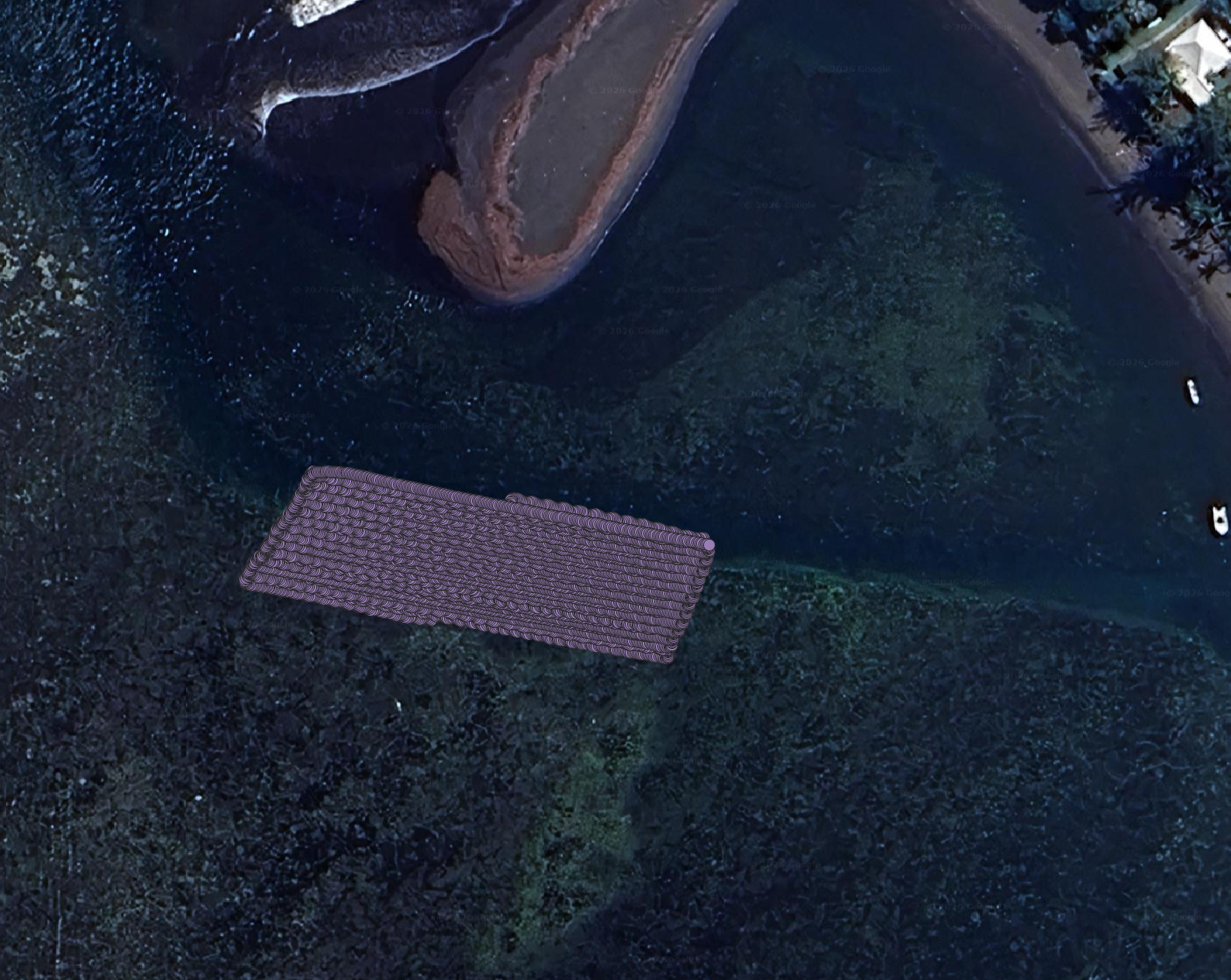
Résultat final :
Application de l'IA (Inférence)
Le traitement se poursuit par l'application de deux modèles d'intelligence artificielle successifs pour trier et analyser les images.
1. Filtrage avec le modèle "Jacques"
La première étape utilise Jacques, un modèle basé sur l'architecture ResNet, conçu pour classer les images en deux catégories : utiles ou inutiles.
Le filtrage élimine les images de "grand bleu", ainsi que celles montrant le ciel ou la plage. Ce processus répond à deux objectifs :
- Éthique et RGPD : Garantir qu'aucun visage identifiable n'est publié sans consentement.
- Optimisation : Éviter de solliciter le second modèle, plus complexe, pour analyser des images sans intérêt biologique.


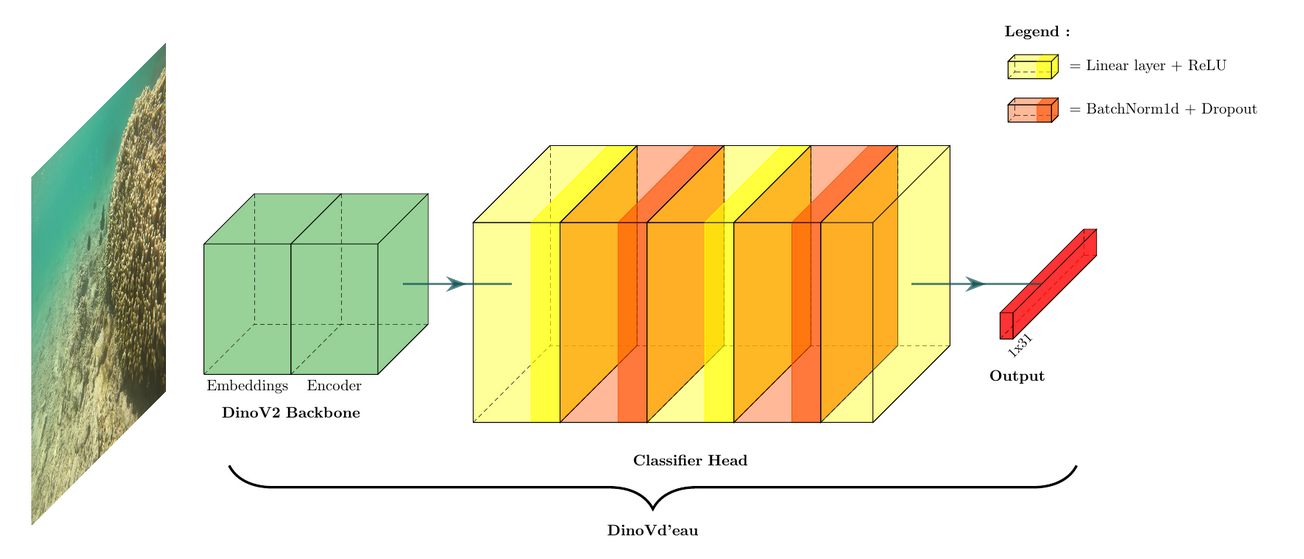
2. Analyse biologique avec "DinoVdeau"
Le second modèle, DinoVdeau, est un modèle entraîné à partir de Dinov2. Il identifie simultanément plusieurs catégories sur une même image.
- Données d'entraînement : Disponible sur HuggingFace et Zenodo.
Exécution de l'inférence
Pour lancer l'analyse, utilisez le dépôt plancha-inference. Une fois l'environnement configuré, exécutez la commande suivante :
python inference.py -efol -pfol /chemin/vers/votre/dossier -c
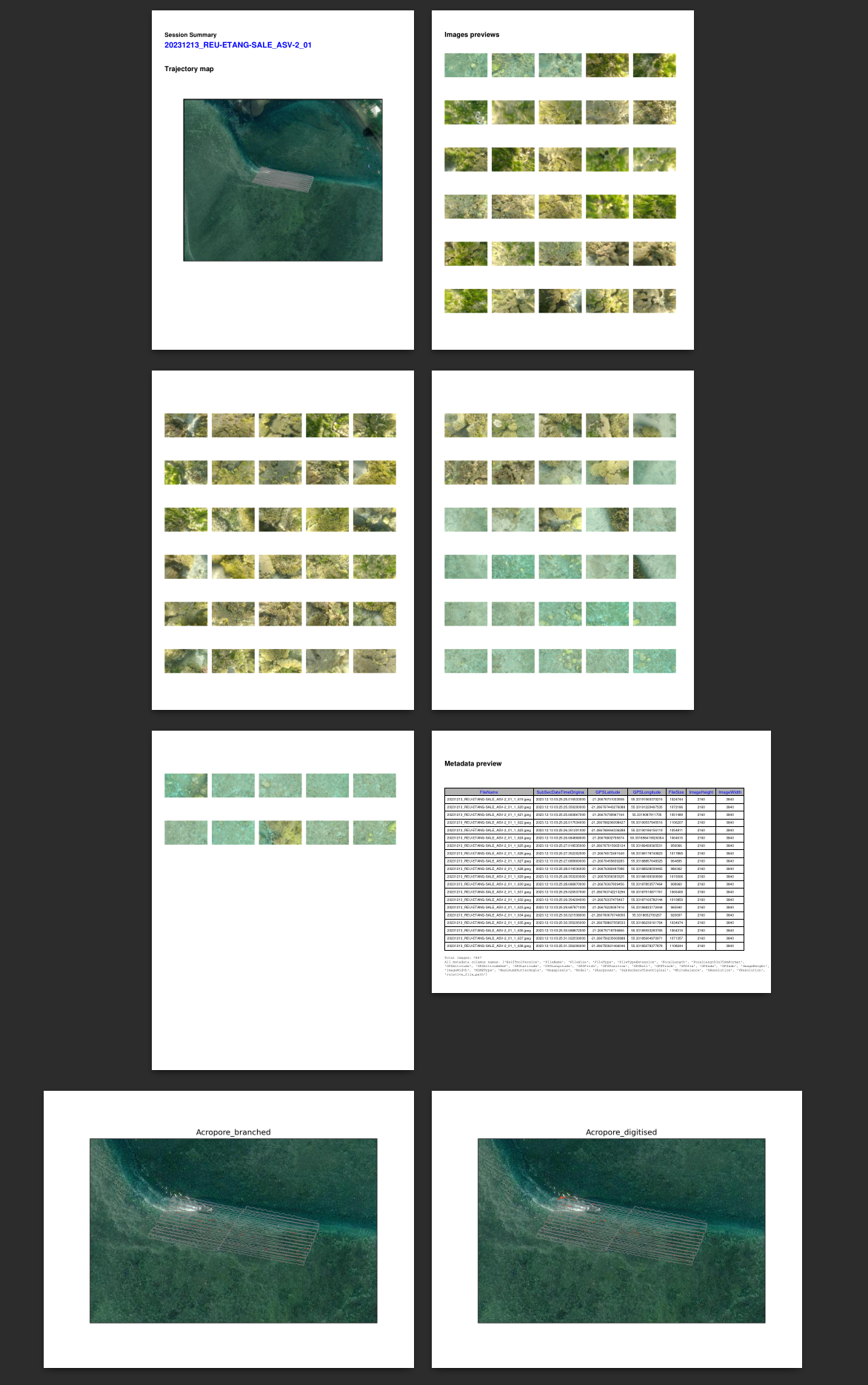
Résultats obtenus
En fin de calcul, le script génère trois types de fichiers :
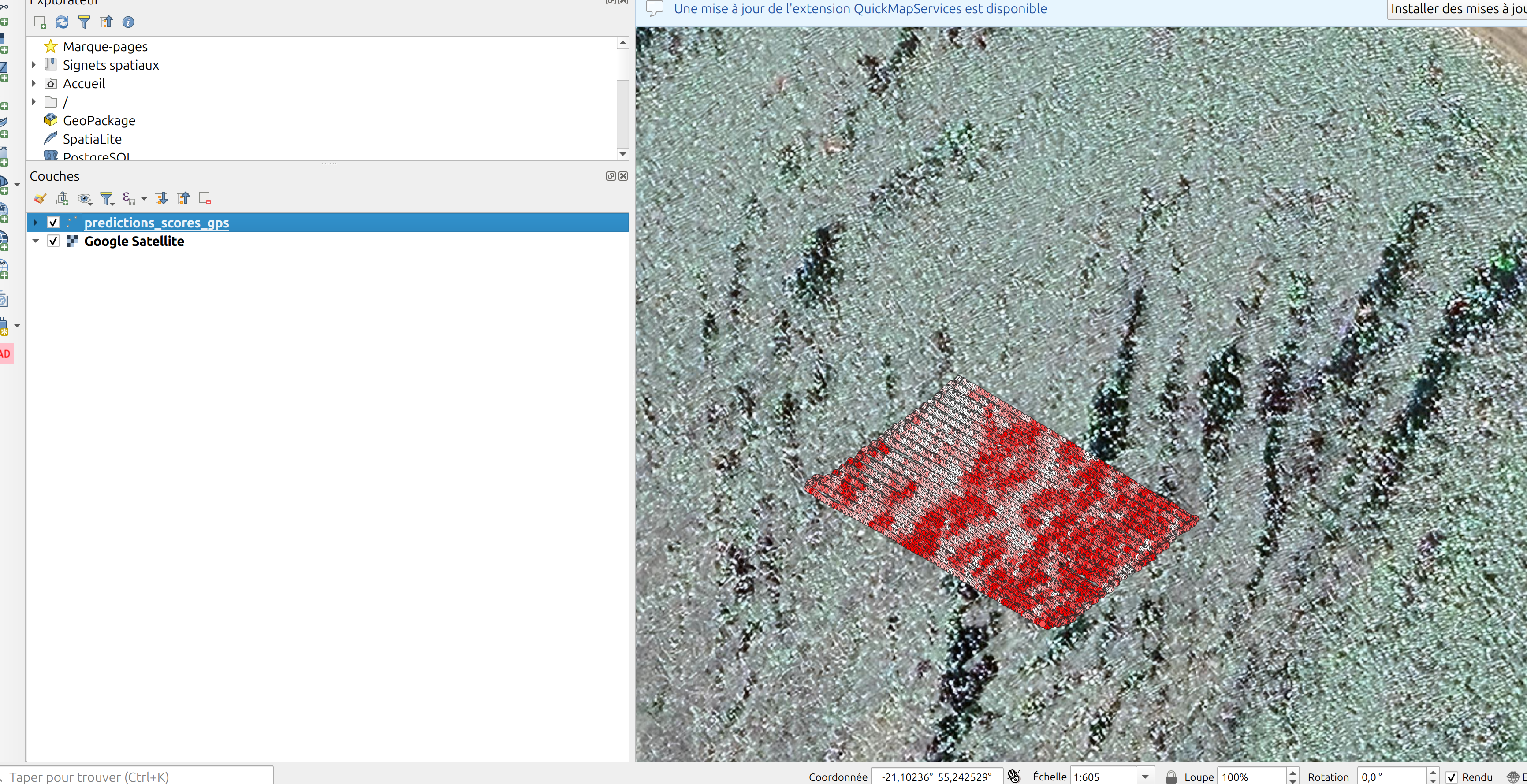
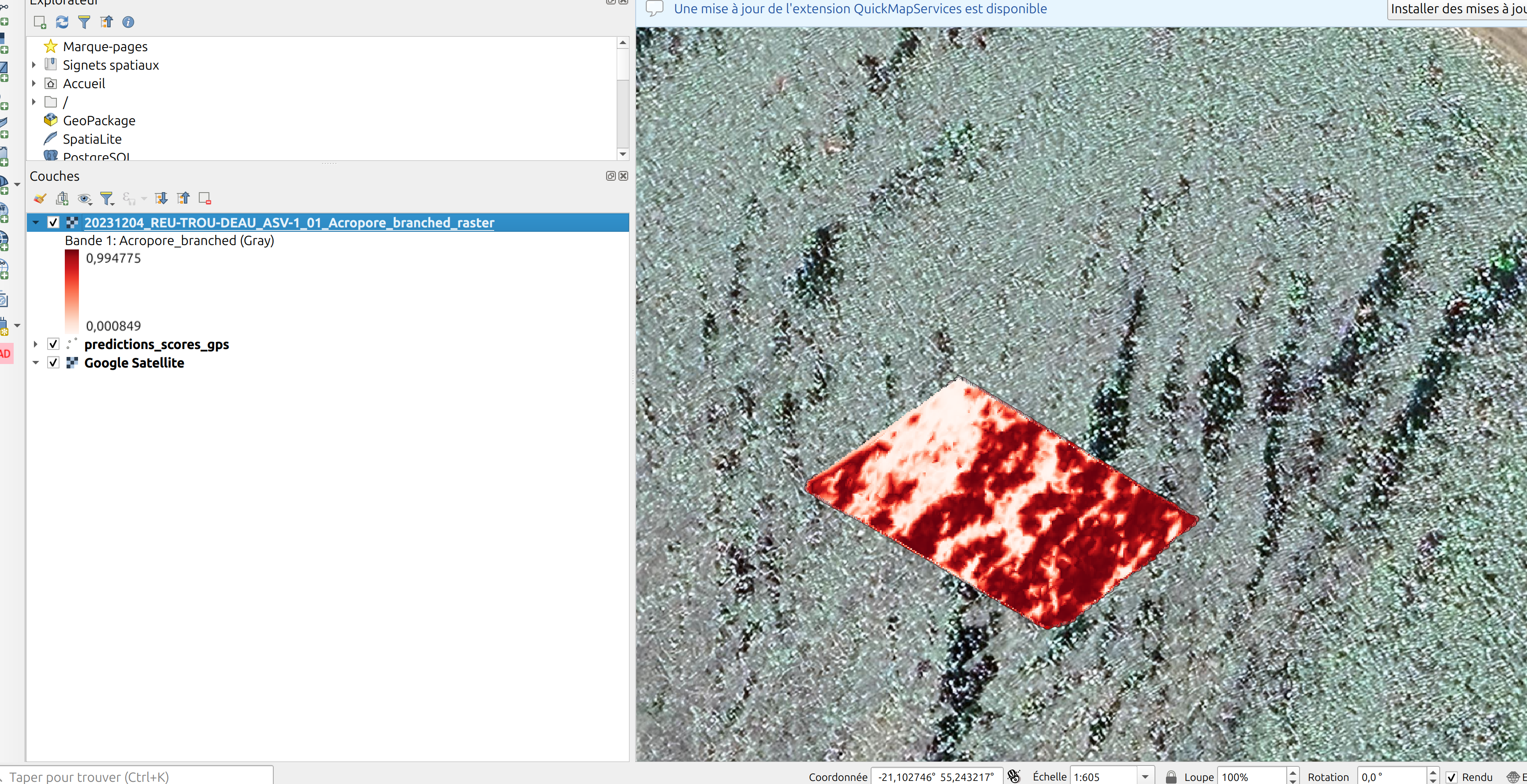
- Un fichier de prédictions : Regroupe les scores de classification associés aux coordonnées GPS.
- Un raster interpolé : Une carte de présence/absence générée à partir des prédictions (l'aspect régulier du transect est important pour obtenir une interpolation de qualité).
- Un rapport PDF : Un document de synthèse récapitulant les statistiques de la session.
Génération d'orthophotos
La création d'orthophotos est une tâche gourmande en ressources. Pour cette raison, l'utilisation du cluster Datarmor est indispensable.
Un script spécifique permet d'automatiser ce processus via OpenDroneMap (ODM) :
👉 Script ODM Datarmor (asv_light.pbs)
Ce script assure les fonctions suivantes :
- Configuration automatique de l'environnement logiciel sur Datarmor.
- Lancement d'OpenDroneMap avec des paramètres optimisés pour les données ASV.
Publication et synchronisation des données
1. Archivage sur Zenodo et mise à jour de l'Atlas
Une fois les données traitées, la session doit être mise en ligne pour garantir sa pérennité. Veuillez vous référer aux guides de la section Outils pour Zenodo pour :
- Téléverser vos sessions sur Zenodo.
- Synchroniser les métadonnées avec la base de données Seatizen Atlas.
2. Hébergement des rasters sur le serveur COG
La dernière étape consiste à rendre les couches cartographiques accessibles via le serveur COG (Cloud Optimized GeoTIFF).
Vous devrez rassembler les rasters suivants :
- Bathymétrie corrigée.
- Prédictions IA (cartes de scores).
- Orthophotos générées sur Datarmor.
Toutes les instructions de déploiement sont détaillées sur le dépôt cog-server ou directement dans l'onglet Ajouter un raster sur cog-server de cette documentation.